Chorégraphie en cuisine : un robot débarrasse la table
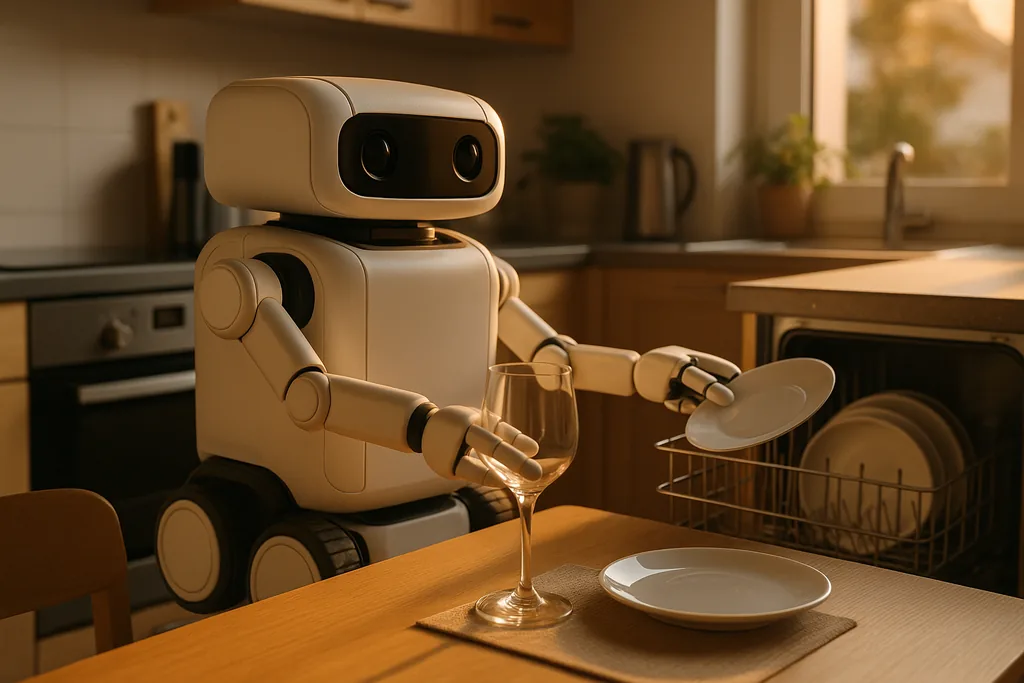
Le 25 novembre 2025, une courte vidéo de la start-up californienne Sunday Robotics a montré un robot compact à roues nommé Memo s'approchant d'une table de salle à manger, ramassant des assiettes et deux verres à vin, et les plaçant dans un lave-vaisselle sans rien casser. Dans les séquences suivantes, Memo a plié des chaussettes et utilisé une machine à expresso. L'entreprise affirme que le système a répété les mêmes prouesses lors de plus de 20 démonstrations en direct sans incident — un jalon modeste mais frappant dans un domaine où les tâches ménagères simples mettent régulièrement en échec des robots de renom.
La machine en scène
Memo n'est pas un humanoïde à forme humaine se tenant sur deux pieds : il s'agit d'une base mobile dotée d'un bras articulé et de mains simples, semblables à des Lego. Ce choix de conception réduit le problème d'ingénierie — les salles de bain et les escaliers sont plus complexes que les cuisines — tout en gardant l'objectif familier pour la plupart des gens : un robot capable de manipuler des objets du quotidien fragiles dont la forme, le poids et la fragilité varient.
La plupart des progrès récents en robotique se sont appuyés sur l'un des deux camps. L'un utilise la simulation à grande échelle et l'apprentissage par renforcement pour entraîner des contrôleurs — une approche qui a produit des avancées rapides dans la locomotion et les comportements coordonnés pour les humanoïdes et les quadrupèdes. L'autre repose sur la téléopération, où des experts guident directement le matériel robotique réel pour collecter des données d'apprentissage ; une méthode précise mais coûteuse.
Sunday Robotics affirme que Memo suit une voie différente. Plutôt que de téléopérer des robots coûteux ou de s'appuyer sur des données synthétiques, l'entreprise a construit des dispositifs en forme de gants adaptés aux mains de Memo et les a distribués à plus de 500 collecteurs de données humains à travers les États-Unis. Les personnes portant les gants effectuent des manipulations domestiques normales pendant que le système enregistre les forces, les schémas de préhension et les mouvements. Cet ensemble de données — des démonstrations humaines cartographiées sur les actionneurs du robot — entraîne Memo à imiter la manipulation humaine dans le monde réel.
L'entreprise soutient que cette approche est pragmatique : chaque gant coûte environ 200 $, contre des dizaines de milliers de dollars nécessaires pour le matériel robotique téléopéré, et la collecte de mesures de force humaine naturelle pourrait combler certaines des lacunes pratiques qui ont entravé les mains robotisées pendant des décennies.
Ce que Memo peut — et ne peut pas — faire
Dans la démonstration, Memo retire la vaisselle et les couverts d'une table et les charge dans le lave-vaisselle, soulève deux verres à vin d'une seule main, plie des articles souples comme des chaussettes et appuie sur les boutons d'une machine à expresso. Ces tâches impliquent la perception (reconnaître les objets et l'endroit où les placer), la planification de la saisie (choisir où et comment tenir l'objet) et le contrôle de la force (quelle pression exercer sur du verre fragile). Chacun de ces points reste un problème de recherche complexe lorsqu'ils sont combinés dans un système unique et polyvalent.
Il est tout aussi notable de souligner ce que Memo ne prétend pas faire : une polyvalence totale dans chaque foyer, une navigation robuste dans des maisons encombrées ou une autonomie de plusieurs heures sans supervision. Les démonstrations sont des tâches domestiques au périmètre restreint dans des environnements contrôlés ; elles montrent une direction prometteuse, mais ne sont pas l'équivalent d'un robot qui prendra immédiatement en charge toutes les tâches ménagères.
Pourquoi cela compte pour la dextérité robotique
Les chercheurs en robotique considèrent depuis longtemps la manipulation d'objets quotidiens comme le goulot d'étranglement des robots domestiques. Les mains humaines regorgent de capteurs tactiles et bénéficient de millions d'années de contrôle proprioceptif ; reproduire cela dans des actionneurs et des logiciels est coûteux. La simulation est puissante pour entraîner des politiques de locomotion où la dynamique de contact est plus facile à modéliser statistiquement, mais simuler l'interaction tactile complète d'ustensiles de cuisine et de tissus quelconques reste un défi majeur.
Questions pratiques et chemin vers les foyers
Il reste cependant des obstacles familiers avant que les machines de type Memo ne deviennent un appareil ménager courant. Les documents publics et les démonstrations de la start-up indiquent des capacités prometteuses mais ne constituent pas une validation indépendante examinée par des pairs. Les questions clés incluent :
- Généralisation : Dans quelle mesure le robot gère-t-il des objets inconnus, des articles gras ou mouillés et le désordre du monde réel qui diffère d'une cuisine de test ?
- Sécurité et fiabilité : Même avec un contrôle précis de la force, les environnements domestiques sont imprévisibles. Comment le logiciel détecte-t-il et récupère-t-il après des saisies manquées ou des chutes accidentelles ? Quelles mesures de protection empêchent le basculement ou les déversements ?
- Coût et maintenance : L'économie liée à la multiplication des capteurs et des actionneurs, ainsi que la durabilité à long terme des mains à bas coût, détermineront l'adoption.
- Vie privée et facteurs humains : Un robot opérant dans des espaces privés soulève des questions sur la collecte de données, les flux vidéo et la manière dont les propriétaires conservent le contrôle et le pouvoir de décision sur les actions de la machine.
Sunday Robotics a cherché à répondre publiquement à certaines inquiétudes : le cofondateur Tony Zhao a décrit Memo comme un « changement radical dans l'IA robotique » et a déclaré que le système n'avait brisé aucun verre à vin au cours de plusieurs démonstrations en direct. Mais la communauté scientifique attend généralement des essais indépendants, des tests de résistance à plus long terme et des rapports transparents sur les modes de défaillance avant de conclure qu'une nouvelle approche est prête pour la production.
Où Memo pourrait s'insérer dans l'écosystème robotique global
Si la collecte de données par gants de Memo s'avère évolutive, elle pourrait transformer la manière dont les entreprises rassemblent des jeux de données de manipulation en conditions réelles. Une instrumentation humaine à bas coût pour enseigner aux mains robotisées pourrait permettre aux start-ups d'itérer à moindre coût sur de multiples prototypes, accélérant ainsi les progrès dans les cuisines, les établissements de soins et les petites entreprises.
Prochaines étapes et perspectives prudentes
Il faut s'attendre à ce que Sunday Robotics et ses rivaux multiplient les démonstrations, publient plus de détails techniques sur la collecte de données et les architectures de contrôle, et commencent des déploiements pilotes dans des foyers partenaires ou des centres de soins. Les régulateurs et les organismes de normalisation qui supervisent la sécurité des robots domestiques seront probablement très attentifs à mesure que les machines quittent les laboratoires pour entrer dans les espaces privés.
La démonstration de Memo marque un pivot pragmatique : au lieu d'attendre une simulation tactile parfaite ou un matériel révolutionnaire, l'idée est de donner aux humains des outils peu coûteux pour apprendre aux machines à manipuler des objets du quotidien fragiles. Si cet hybride de données humaines et de matériel ciblé se développe, il pourrait apporter une aide pratique dans les foyers plus tôt que certaines approches purement axées sur la recherche. Mais comme pour de nombreuses avancées en robotique, le chemin d'une cuisine de démonstration bien rangée vers des millions de salons sera long, itératif et parsemé de compromis techniques et sociaux.
Sources
- Sunday Robotics (démonstration de l'entreprise et résumés techniques)
- Humanoid (matériel de projet et démonstrations HMND 01 Alpha)
- NVIDIA Isaac Sim (documentation sur l'entraînement de robots par simulation)

Comments
No comments yet. Be the first!