Keukenchoreografie: een robot ruimt de tafel af
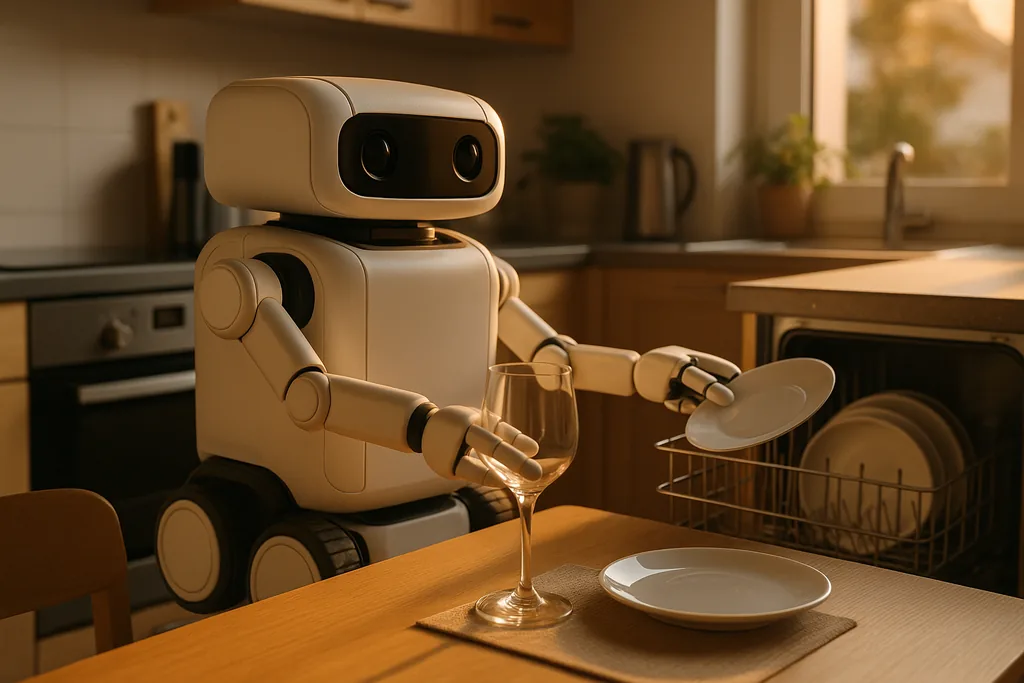
Op 25 november 2025 toonde een korte video van de Californische start-up Sunday Robotics een compacte, verrijdbare robot genaamd Memo die naar een eettafel rolde, borden en twee wijnglazen oppakte en deze in een vaatwasser plaatste zonder iets te breken. In de daaropvolgende fragmenten vouwde Memo sokken op en bediende hij een espressomachine. Het bedrijf zegt dat het systeem dezelfde kunstjes in meer dan 20 live demonstraties zonder incidenten heeft herhaald — een kleine maar opvallende mijlpaal in een vakgebied waarin eenvoudige huishoudelijke taken doorgaans te machtig zijn voor vooraanstaande robots.
De machine op het podium
Memo is geen mensvormige humanoïde die op twee voeten staat: het is een mobiele basis met een gelede arm en eenvoudige, Lego-achtige handen. Die ontwerpkeuze beperkt het technische probleem — badkamers en trappen zijn lastiger dan keukens — terwijl het doel voor de meeste mensen herkenbaar blijft: een robot die breekbare, alledaagse voorwerpen hanteert die variëren in vorm, gewicht en kwetsbaarheid.
De meeste recente vooruitgang in de robotica steunt op een van twee kampen. Het ene maakt gebruik van grootschalige simulatie en reinforcement learning om controllers te trainen — een aanpak die heeft geleid tot snelle vorderingen in voortbeweging en gecoördineerd gedrag voor humanoïden en viervoeters. Het andere vertrouwt op teleoperatie, waarbij experts de robot-hardware direct aansturen om trainingsgegevens te verzamelen; dat is nauwkeurig, maar duur.
Sunday Robotics zegt dat Memo een ander pad volgt. In plaats van het op afstand besturen van dure robots of te vertrouwen op synthetische data, bouwde het bedrijf handschoenvormige apparaten die zijn afgestemd op de handen van Memo en verspreidde deze onder meer dan 500 menselijke dataverzamelaars in de Verenigde Staten. Mensen die de handschoenen dragen, voeren normale huishoudelijke handelingen uit terwijl het systeem krachten, grippatronen en bewegingen registreert. Die dataset — menselijke demonstraties gekoppeld aan de actuatoren van de robot — traint Memo om het menselijk handelen in de echte wereld na te bootsen.
Het bedrijf stelt dat deze aanpak pragmatisch is: elke handschoen kost ongeveer 200 dollar, vergeleken met de tienduizenden dollars die nodig zijn voor teleoperated robot-hardware. Het verzamelen van natuurlijke menselijke krachtmetingen zou bovendien enkele praktische hiaten kunnen overbruggen die robothanden al decennia hinderen.
Wat Memo wel — en niet — kan
In de demo ruimt Memo servies en bestek af van een tafel en plaatst dit in de vaatwasser, tilt hij twee wijnglazen op met één hand, vouwt hij zachte items zoals sokken en drukt hij op knoppen van een espressoapparaat. Bij die taken komen perceptie (het herkennen van objecten en waar ze geplaatst moeten worden), greepplanning (kiezen waar en hoe iets vast te pakken) en krachtbeheersing (hoe hard er in breekbaar glas geknepen moet worden) kijken. Elk van deze punten is nog steeds een actueel onderzoeksprobleem wanneer ze gecombineerd worden in een enkel systeem voor algemene doeleinden.
Evenzeer opmerkelijk is wat Memo niet claimt: volledige algemeenheid in elk huishouden, robuuste navigatie door rommelige huizen, of autonomie gedurende uren zonder toezicht. De demonstraties betreffen nauw omschreven huishoudelijke taken in gecontroleerde omgevingen; ze tonen een veelbelovende richting, maar zijn niet hetzelfde als een robot die onmiddellijk al het huishoudelijk werk overneemt.
Waarom dit belangrijk is voor robot-behendigheid
Roboticawetenschappers wijzen al lang op de manipulatie van alledaagse voorwerpen als de bottleneck voor huishoudelijke robots. Menselijke handen zitten vol met tactiele sensoren en beschikken over miljoenen jaren aan proprioceptieve controle; het nabootsen daarvan in actuatoren en software is kostbaar. Simulatie is krachtig voor het trainen van voortbewegingsbeleid waarbij contactdynamiek statistisch gemakkelijker te modelleren is, maar het simuleren van de volledige tactiele interactie van willekeurig keukengerei en textiel blijft een grote uitdaging.
Praktische vragen en de weg naar de echte woning
Er zijn echter de bekende hindernissen voordat machines in de stijl van Memo een algemeen huishoudelijk apparaat worden. Het publieke materiaal en de demo's van de start-up duiden op veelbelovende capaciteiten, maar blijven achter bij onafhankelijke, peer-reviewed validatie. Belangrijke vragen zijn onder meer:
- Generalisatie: Hoe goed gaat de robot om met onbekende objecten, vette of natte voorwerpen, en de rommel van de echte wereld die afwijkt van een testkeuken?
- Veiligheid en betrouwbaarheid: Zelfs met zorgvuldige krachtbeheersing zijn huishoudelijke omgevingen onvoorspelbaar. Hoe detecteert de software een mislukte greep of een ongelukje en hoe herstelt hij daarvan? Welke beveiligingen voorkomen omvallen of morsen?
- Kosten en onderhoud: De economische aspecten van meerdere sensoren, actuatoren en ondersteuning — en de duurzaamheid op lange termijn van goedkope handen — zullen de adoptie bepalen.
- Privacy en menselijke factoren: Een robot die in privéruimtes opereert, roept vragen op over gegevensverzameling, videostreams en hoe eigenaren de controle en zeggenschap behouden over de beslissingen van de machine.
Sunday Robotics heeft geprobeerd enkele zorgen publiekelijk weg te nemen: mede-oprichter Tony Zhao beschreef Memo als een "sprong voorwaarts in robot-AI" en zei dat het systeem tijdens verschillende live demo's geen wijnglazen had gebroken. Maar de bredere gemeenschap kijkt doorgaans naar onafhankelijke tests, stresstests op langere termijn en transparante rapportage van foutmodi voordat de conclusie wordt getrokken dat een nieuwe aanpak klaar is voor productie.
Waar Memo past in het bredere robot-ecosysteem
Als de op handschoenen gebaseerde dataverzameling van Memo schaalbaar blijkt te zijn, zou dit de manier waarop bedrijven datasets voor manipulatie in de echte wereld verzamelen, kunnen veranderen. Goedkope menselijke instrumentatie om robothanden te instrueren, kan start-ups in staat stellen om betaalbaar te itereren op meerdere prototypen, wat de voortgang in keukens, zorginstellingen en kleine bedrijven versnelt.
Volgende stappen en een voorzichtige vooruitblik
De verwachting is dat Sunday Robotics en concurrenten hun demonstraties zullen uitbreiden, meer technische details zullen publiceren over dataverzameling en controle-architecturen, en zullen beginnen met pilot-implementaties in partnerwoningen of zorginstellingen. Toezichthouders en normeringsinstanties die toezien op de veiligheid van huishoudelijke robots zullen waarschijnlijk nauwlettend meekijken wanneer machines de laboratoria verlaten en privéruimtes betreden.
De demo van Memo markeert een pragmatische koerswijziging: in plaats van te wachten op perfecte tactiele simulatie of baanbrekende hardware, krijgen mensen goedkope tools om machines te leren hoe ze breekbare, alledaagse voorwerpen moeten hanteren. Als die hybride van menselijke data en gerichte hardware schaalbaar is, zou dit sneller praktische hulp in huis kunnen bieden dan sommige puur onderzoeksgestuurde benaderingen. Maar zoals bij veel vorderingen in de robotica, zal de weg van een opgeruimde demokeuken naar miljoenen woonkamers lang zijn, vol iteraties en technische en sociale afwegingen.
Bronnen
- Sunday Robotics (bedrijfsdemonstratie en technische samenvattingen)
- Humanoid (materiaal en demonstraties van het HMND 01 Alpha-project)
- NVIDIA Isaac Sim (documentatie over simulatiegestuurde robottraining)

Comments
No comments yet. Be the first!