Coreografia na cozinha: um robô tira a mesa
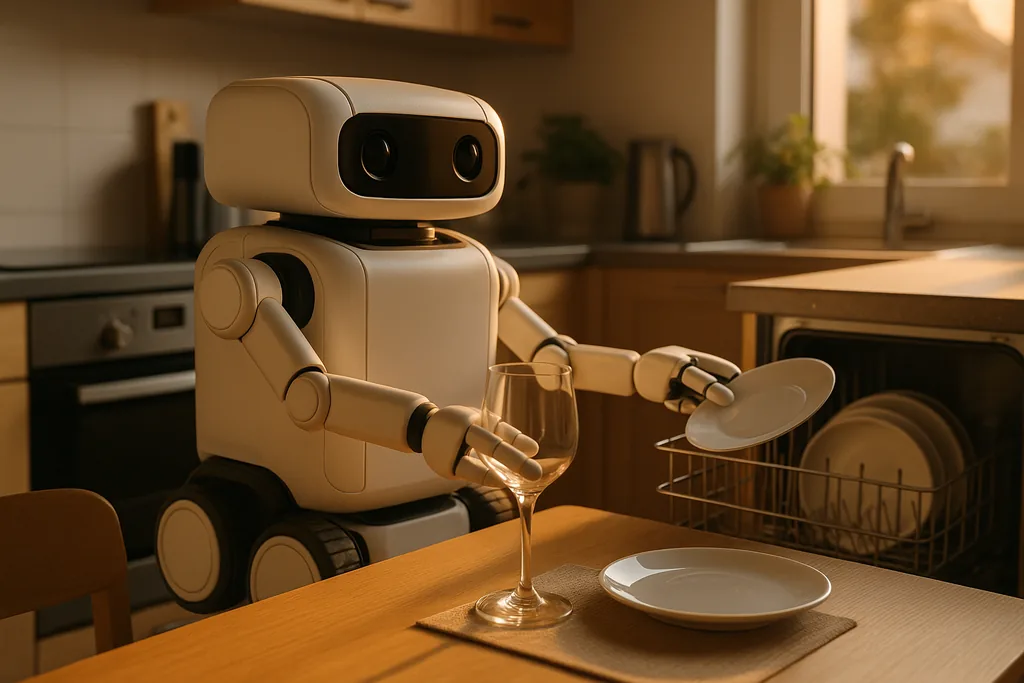
Em 25 de novembro de 2025, um pequeno vídeo da start-up californiana Sunday Robotics mostrou um robô compacto com rodas chamado Memo aproximando-se de uma mesa de jantar, recolhendo pratos e duas taças de vinho, e colocando-os em uma lava-louças sem quebrar nada. Em clipes subsequentes, o Memo dobrou meias e operou uma máquina de café expresso. A empresa afirma que o sistema repetiu as mesmas proezas em mais de 20 demonstrações ao vivo sem incidentes — um pequeno mas marcante marco em um campo onde tarefas domésticas simples rotineiramente derrotam robôs de alto perfil.
A máquina no palco
O Memo não é um humanoide com forma humana em pé sobre dois pés: é uma base móvel com um braço articulado e mãos simples, parecidas com Lego. Essa escolha de design estreita o problema de engenharia — banheiros e escadas são mais difíceis do que cozinhas — enquanto mantém o objetivo familiar para a maioria das pessoas: um robô que lida com objetos frágeis do cotidiano que variam em forma, peso e fragilidade.
A maior parte do progresso recente na robótica tem se apoiado em um de dois campos. Um utiliza simulação em larga escala e aprendizado por reforço para treinar controladores — uma abordagem que produziu avanços rápidos em locomoção e comportamentos coordenados para humanoides e quadrúpedes. O outro baseia-se na teleoperação, onde especialistas guiam diretamente o hardware robótico real para coletar dados de ensino; isso é preciso, mas caro.
A Sunday Robotics afirma que o Memo segue um caminho diferente. Em vez de teleoperar robôs caros ou depender de dados sintéticos, a empresa construiu dispositivos em formato de luva ajustados às mãos do Memo e os distribuiu para mais de 500 coletores de dados humanos em todos os Estados Unidos. Pessoas usando as luvas realizam manipulações domésticas normais enquanto o sistema registra forças, padrões de aderência e movimentos. Esse conjunto de dados — demonstrações humanas mapeadas para os atuadores do robô — treina o Memo para imitar o manuseio humano no mundo real.
A empresa argumenta que essa abordagem é pragmática: cada luva custa aproximadamente US$ 200, em comparação com as dezenas de milhares de dólares necessários para o hardware robótico teleoperado, e a coleta de medições naturais de força humana pode superar algumas das lacunas práticas que dificultaram as mãos robóticas por décadas.
O que o Memo pode — e não pode — fazer
Na demonstração, o Memo remove louças e talheres de uma mesa e os coloca na lava-louças, levanta duas taças de vinho com uma mão, dobra itens macios como meias e pressiona botões em uma cafeteira expresso. Essas tarefas envolvem percepção (reconhecer objetos e onde colocá-los), planejamento de preensão (escolher onde e como segurar) e controle de força (quão forte apertar vidros frágeis). Cada um desses pontos ainda é um problema de pesquisa em andamento quando combinados em um único sistema de uso geral.
Igualmente notável é o que o Memo não reivindica: generalidade total em todas as residências, navegação robusta por casas desordenadas ou autonomia por horas sem supervisão. As demonstrações são tarefas domésticas de escopo restrito em ambientes controlados; elas mostram uma direção promissora, mas não são o mesmo que um robô que assumirá todo o trabalho doméstico imediatamente.
Por que isso é importante para a destreza robótica
Pesquisadores de robótica há muito apontam a manipulação de objetos cotidianos como o gargalo para os robôs domésticos. As mãos humanas estão repletas de sensores táteis e milhões de anos de controle proprioceptivo; replicar isso em atuadores e software é caro. A simulação é poderosa para treinar políticas de locomoção onde a dinâmica de contato é mais fácil de modelar estatisticamente, mas simular a interação tátil completa de utensílios de cozinha e tecidos arbitrários continua sendo um grande desafio.
Questões práticas e o caminho para lares reais
Existem, no entanto, obstáculos familiares antes que máquinas ao estilo Memo se tornem um eletrodoméstico comum. O material público e as demonstrações da start-up indicam uma capacidade promissora, mas não chegam a uma validação independente e revisada por pares. As principais questões incluem:
- Generalização: quão bem o robô lida com objetos desconhecidos, itens gordurosos ou molhados e bagunças do mundo real que diferem de uma cozinha de teste?
- Segurança e confiabilidade: mesmo com um controle de força cuidadoso, os ambientes domésticos são desordenados. Como o software detecta e se recupera de falhas de preensão ou quedas acidentais? Quais salvaguardas evitam tombamentos ou derramamentos?
- Custo e manutenção: a economia de múltiplos sensores, atuadores e suporte — e a durabilidade a longo prazo de mãos de baixo custo — determinarão a adoção.
- Privacidade e fatores humanos: um robô que opera em espaços privados levanta questões sobre coleta de dados, fluxos de vídeo e como os proprietários mantêm o controle e a autonomia sobre as decisões da máquina.
A Sunday Robotics procurou abordar algumas preocupações publicamente: o cofundador Tony Zhao descreveu o Memo como uma "mudança de patamar na IA robótica" e disse que o sistema não quebrou taças de vinho ao longo de várias demonstrações ao vivo. Mas a comunidade em geral normalmente busca testes independentes, testes de estresse de longo prazo e relatórios transparentes de modos de falha antes de concluir que uma nova abordagem está pronta para produção.
Onde o Memo poderia se encaixar no ecossistema robótico mais amplo
Se a coleta de dados baseada em luvas do Memo se mostrar escalável, ela poderá remodelar a forma como as empresas reúnem conjuntos de dados de manipulação do mundo real. Instrumentação humana de baixo custo para ensinar mãos robóticas pode permitir que start-ups iterem de forma acessível em múltiplos protótipos, acelerando o progresso em cozinhas, casas de repouso e pequenas empresas.
Próximos passos e uma perspectiva cautelosa
Espera-se que a Sunday Robotics e seus rivais expandam as demonstrações, publiquem mais detalhes técnicos sobre a coleta de dados e arquiteturas de controle, e iniciem implementações piloto em lares parceiros ou instalações de cuidados. Reguladores e grupos de padrões que supervisionam a segurança de robôs domésticos provavelmente prestarão muita atenção à medida que as máquinas saem dos laboratórios e entram em espaços privados.
A demonstração do Memo marca um pivô pragmático: em vez de esperar por uma simulação tátil perfeita ou hardware revolucionário, ofereça aos humanos ferramentas baratas para ensinar as máquinas a lidar com objetos frágeis e cotidianos. Se esse híbrido de dados humanos e hardware direcionado ganhar escala, poderá fornecer ajuda prática nos lares mais cedo do que algumas abordagens puramente voltadas para a pesquisa. Mas, como ocorre com muitos avanços na robótica, o caminho de uma cozinha de demonstração arrumada para milhões de salas de estar será longo, iterativo e cheio de trade-offs técnicos e sociais.
Fontes
- Sunday Robotics (demonstração da empresa e resumos técnicos)
- Humanoid (materiais e demonstrações do projeto HMND 01 Alpha)
- NVIDIA Isaac Sim (documentação sobre treinamento de robôs baseado em simulação)

Comments
No comments yet. Be the first!