Coreografía en la cocina: un robot recoge la mesa
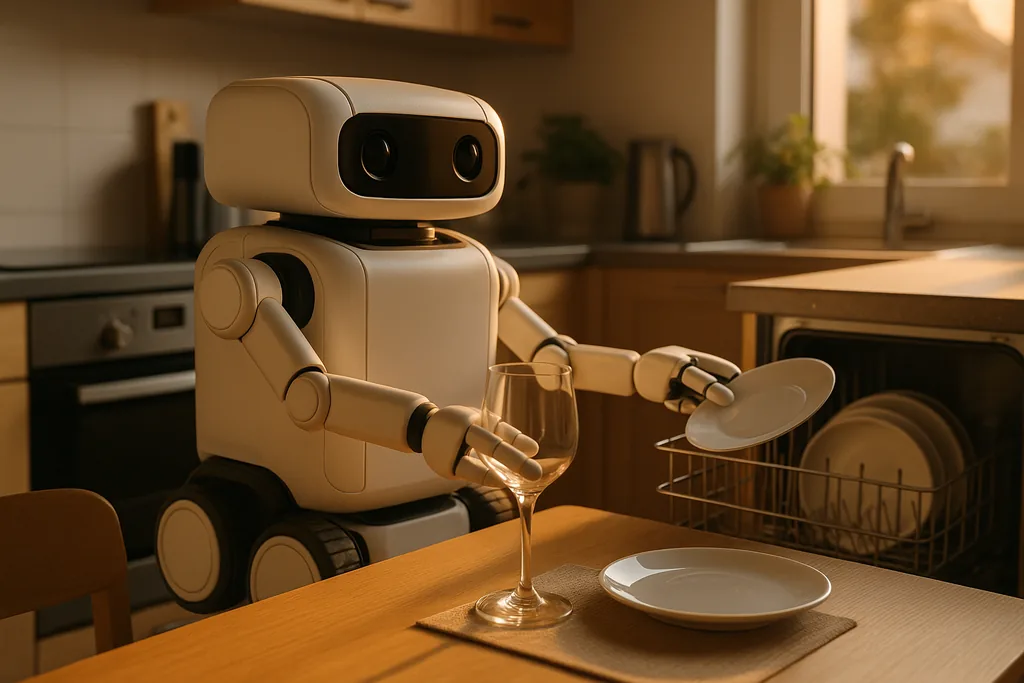
El 25 de noviembre de 2025, un breve vídeo de la start-up de California Sunday Robotics mostró a un robot compacto con ruedas llamado Memo acercándose a una mesa de comedor, recogiendo platos y dos copas de vino, y colocándolos en un lavavajillas sin romper nada. En clips posteriores, Memo dobló calcetines y operó una cafetera expreso. La empresa afirma que el sistema ha repetido los mismos trucos en más de 20 demostraciones en vivo sin incidentes —un hito pequeño pero sorprendente en un campo donde las tareas domésticas sencillas suelen derrotar a los robots de alto perfil.
La máquina en escena
Memo no es un humanoide con forma humana apoyado sobre dos pies: es una base móvil con un brazo articulado y manos sencillas, similares a las de Lego. Esa elección de diseño estrecha el problema de ingeniería —los baños y las escaleras son más difíciles que las cocinas— a la vez que mantiene el objetivo familiar para la mayoría de las personas: un robot que manipula objetos cotidianos y frágiles que varían en forma, peso y fragilidad.
La mayor parte de los progresos recientes en robótica se han apoyado en uno de dos bandos. Uno utiliza la simulación a gran escala y el aprendizaje por refuerzo para entrenar controladores, un enfoque que ha producido avances rápidos en la locomoción y los comportamientos coordinados de humanoides y cuadrúpedos. El otro se basa en la teleoperación, donde expertos guían directamente el hardware robótico real para recopilar datos de aprendizaje; eso es preciso pero costoso.
Sunday Robotics dice que Memo sigue un camino diferente. En lugar de teleoperar robots caros o depender de datos sintéticos, la empresa construyó dispositivos con forma de guante adaptados a las manos de Memo y los distribuyó a más de 500 recolectores de datos humanos en todo Estados Unidos. Las personas que llevan los guantes realizan manipulaciones domésticas normales mientras el sistema registra fuerzas, patrones de agarre y movimientos. Ese conjunto de datos —demostraciones humanas mapeadas a los actuadores del robot— entrena a Memo para imitar el manejo humano en el mundo real.
La empresa sostiene que este enfoque es pragmático: cada guante cuesta aproximadamente 200 dólares en comparación con las decenas de miles de dólares necesarios para el hardware robótico teleoperado, y la recopilación de mediciones de fuerza humana natural puede cerrar algunas de las brechas prácticas que han obstaculizado las manos robóticas durante décadas.
Lo que Memo puede —y no puede— hacer
En la demostración, Memo retira los platos y cubiertos de una mesa y los mete en el lavavajillas, levanta dos copas de vino con una mano, dobla prendas suaves como calcetines y pulsa botones en una cafetera expreso. Esas tareas implican percepción (reconocer objetos y dónde colocarlos), planificación de agarre (elegir dónde y cómo sujetar) y control de fuerza (con qué fuerza apretar el cristal frágil). Cada uno de estos puntos sigue siendo un problema de investigación en curso cuando se combinan en un único sistema de propósito general.
Igualmente notable es lo que Memo no afirma: una generalidad total en todos los hogares, una navegación robusta a través de casas desordenadas o autonomía durante horas sin supervisión. Las demostraciones son tareas domésticas de alcance limitado en entornos controlados; muestran una dirección prometedora, pero no equivalen a un robot que se hará cargo de todas las tareas del hogar de inmediato.
Por qué esto es importante para la destreza robótica
Los investigadores en robótica han señalado durante mucho tiempo que la manipulación de objetos cotidianos es el cuello de botella para los robots domésticos. Las manos humanas están repletas de sensores táctiles y millones de años de control propioceptivo; replicar eso en actuadores y software es costoso. La simulación es potente para entrenar políticas de locomoción donde la dinámica de contacto es más fácil de modelar estadísticamente, pero simular la interacción táctil completa de utensilios de cocina y tejidos arbitrarios sigue siendo un desafío importante.
Preguntas prácticas y el camino hacia los hogares reales
Existen, sin embargo, obstáculos familiares antes de que las máquinas al estilo de Memo se conviertan en un electrodoméstico común. El material público y las demostraciones de la start-up indican una capacidad prometedora, pero carecen de una validación independiente revisada por pares. Las preguntas clave incluyen:
- Generalización: ¿Cómo maneja el robot objetos desconocidos, artículos grasientos o mojados y el desorden del mundo real que difiere de una cocina de prueba?
- Seguridad y fiabilidad: Incluso con un control cuidadoso de la fuerza, los entornos domésticos son caóticos. ¿Cómo detecta el software los agarres fallidos o las caídas accidentales y cómo se recupera de ellos? ¿Qué medidas de seguridad evitan vuelcos o derrames?
- Coste y mantenimiento: La economía de los múltiples sensores, actuadores y el soporte —y la durabilidad a largo plazo de las manos de bajo coste— determinarán su adopción.
- Privacidad y factores humanos: Un robot que opera en espacios privados plantea preguntas sobre la recopilación de datos, las transmisiones de vídeo y cómo los propietarios mantienen el control y la capacidad de decisión sobre las determinaciones de la máquina.
Sunday Robotics ha tratado de abordar algunas preocupaciones públicamente: el cofundador Tony Zhao describió a Memo como un "salto cualitativo en la IA robótica" y dijo que el sistema no había roto ninguna copa de vino a lo largo de varias demostraciones en vivo. Pero la comunidad en general suele buscar ensayos independientes, pruebas de esfuerzo a más largo plazo e informes transparentes sobre los modos de fallo antes de concluir que un nuevo enfoque está listo para la producción.
Dónde podría encajar Memo en el ecosistema robótico más amplio
Si la recopilación de datos basada en guantes de Memo resulta escalable, podría remodelar la forma en que las empresas reúnen conjuntos de datos de manipulación del mundo real. La instrumentación humana de bajo coste para enseñar a las manos robóticas podría permitir a las start-ups iterar de forma asequible en múltiples prototipos, acelerando el progreso en cocinas, residencias de ancianos y pequeñas empresas.
Próximos pasos y una perspectiva cautelosa
Es de esperar que Sunday Robotics y sus rivales amplíen las demostraciones, publiquen más detalles técnicos sobre la recopilación de datos y las arquitecturas de control, y comiencen despliegues piloto en hogares asociados o centros de cuidados. Los reguladores y los grupos de normalización que supervisan la seguridad de los robots domésticos probablemente prestarán mucha atención a medida que las máquinas abandonen los laboratorios y entren en espacios privados.
La demostración de Memo marca un giro pragmático: en lugar de esperar a una simulación táctil perfecta o a un hardware revolucionario, se dota a los humanos de herramientas económicas para enseñar a las máquinas a manejar objetos cotidianos y frágiles. Si ese híbrido de datos humanos y hardware específico escala, podría ofrecer ayuda práctica en los hogares antes que algunos enfoques puramente impulsados por la investigación. Pero, como ocurre con muchos avances en robótica, el camino desde una cocina de demostración ordenada hasta millones de salas de estar será largo, iterativo y estará lleno de compensaciones técnicas y sociales.
Fuentes
- Sunday Robotics (demostración de la empresa y resúmenes técnicos)
- Humanoid (materiales del proyecto HMND 01 Alpha y demostraciones)
- NVIDIA Isaac Sim (documentación sobre el entrenamiento de robots basado en simulaciones)

Comments
No comments yet. Be the first!