주방의 안무: 테이블을 치우는 로봇
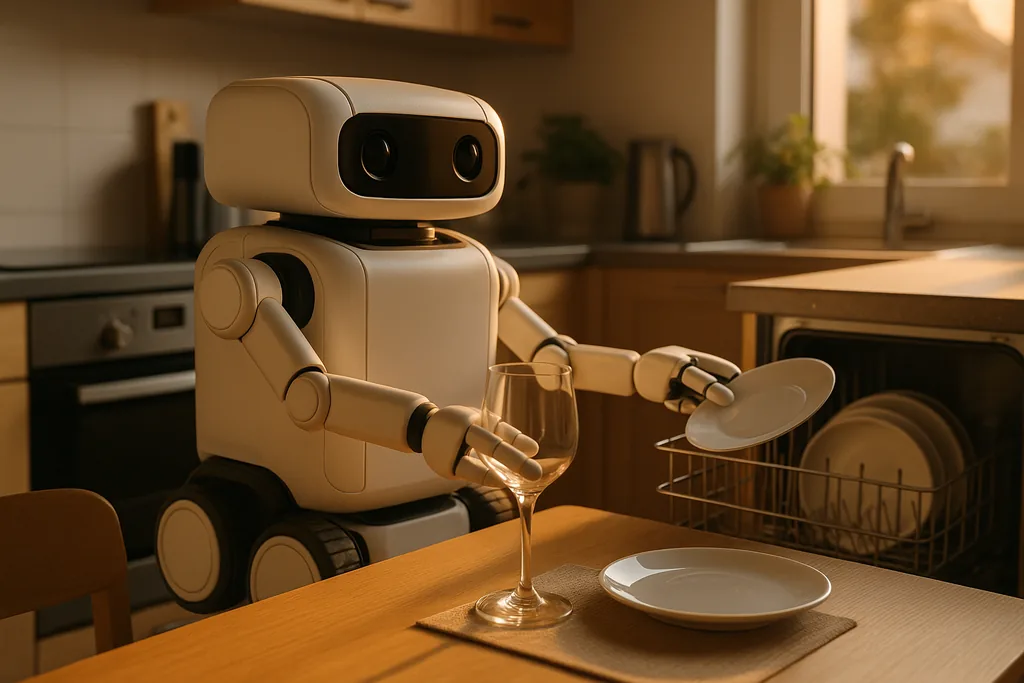
2025년 11월 25일, 캘리포니아의 스타트업 Sunday Robotics가 공개한 짧은 영상에는 Memo라는 이름의 소형 바퀴형 로봇이 식탁으로 다가가 접시와 와인 잔 두 개를 집어 들어 아무것도 깨뜨리지 않고 식기세척기에 넣는 모습이 담겼습니다. 이어지는 영상에서 Memo는 양말을 개고 에스프레소 머신을 작동했습니다. 회사 측은 이 시스템이 20회 이상의 실시간 시연에서 사고 없이 동일한 기술을 반복했다고 밝혔으며, 이는 단순한 가사 업무가 고성능 로봇들을 일상적으로 좌절시키는 분야에서 작지만 인상적인 이정표입니다.
무대 위의 기계
Memo는 두 발로 서 있는 인간 형상의 휴머노이드가 아닙니다. 다관절 팔과 레고 블록 같은 단순한 손을 가진 이동식 기단(mobile base) 형태입니다. 이러한 설계 선택은 화장실이나 계단이 주방보다 훨씬 어렵다는 점을 고려하여 공학적 문제의 범위를 좁히는 동시에, 모양, 무게, 취약성이 제각각인 일상 용품을 다루는 로봇이라는 대중에게 친숙한 목표를 유지합니다.
최근 robotics 분야의 진보는 주로 두 가지 진영에 의존해 왔습니다. 한 진영은 대규모 시뮬레이션과 강화 학습을 사용하여 제어기를 학습시키는데, 이 방식은 휴머노이드와 사족 보행 로봇의 보행 및 조정된 행동에서 빠른 진전을 이루어냈습니다. 다른 진영은 전문가가 실제 로봇 하드웨어를 직접 안내하여 학습 데이터를 수집하는 원격 제어(teleoperation)에 의존하며, 이는 정밀하지만 비용이 많이 듭니다.
Sunday Robotics는 Memo가 다른 길을 걷고 있다고 말합니다. 비싼 로봇을 원격 제어하거나 합성 데이터에 의존하는 대신, 이 회사는 Memo의 손에 맞춘 장갑 형태의 장치를 제작하여 미국 전역의 500명 이상의 인간 데이터 수집가에게 배포했습니다. 장갑을 착용한 사람들이 평범한 가사 조작을 수행하면 시스템이 힘, 움켜쥐는 패턴(grip patterns), 움직임을 기록합니다. 로봇의 액추에이터에 매핑된 이 인간 시연 데이터셋은 Memo가 실제 환경에서 인간의 취급 방식을 모방하도록 학습시킵니다.
회사 측은 이 접근 방식이 실용적이라고 주장합니다. 원격 제어용 로봇 하드웨어에 수만 달러가 소요되는 것과 비교해 장갑 한 쌍의 비용은 약 200달러에 불과하며, 자연스러운 인간의 힘 측정치를 수집하는 것이 수십 년 동안 로봇 손의 발목을 잡아온 실질적인 간극을 메워줄 수 있기 때문입니다.
Memo가 할 수 있는 것과 할 수 없는 것
시연에서 Memo는 식탁에서 접시와 수저를 치워 식기세척기에 넣고, 한 손으로 와인 잔 두 개를 들어 올리며, 양말 같은 부드러운 물건을 개고 에스프레소 머신의 버튼을 누릅니다. 이러한 작업에는 인지(물체와 놓을 위치를 인식), 파지 계획(grasp planning, 어디를 어떻게 잡을지 선택), 힘 제어(force control, 깨지기 쉬운 유리를 얼마나 세게 쥘지)가 포함됩니다. 이들 각각은 단일 범용 시스템에 결합될 때 여전히 진행 중인 연구 과제입니다.
Memo가 주장하지 않는 부분 역시 주목할 만합니다. 모든 가정에서의 완전한 범용성, 복잡한 집안에서의 견고한 내비게이션, 또는 감독 없는 수 시간 동안의 자율성 등입니다. 이번 시연은 통제된 환경 내에서 좁게 범위가 정해진 가사 업무들이며, 이는 유망한 방향을 보여주기는 하지만 모든 집안일을 즉시 대신할 로봇과 동일한 것은 아닙니다.
로봇의 기교(dexterity)에 있어 이것이 중요한 이유
로봇 공학 연구자들은 오랫동안 일상 물체의 조작(manipulation)을 가정용 로봇의 병목 현상으로 지적해 왔습니다. 인간의 손은 수많은 촉각 센서와 수백만 년의 고유 수용성 제어(proprioceptive control) 능력을 갖추고 있으며, 이를 액추에이터와 소프트웨어로 복제하는 것은 비용이 많이 듭니다. 시뮬레이션은 접촉 역학을 통계적으로 모델링하기 쉬운 보행 정책을 학습시키는 데는 강력하지만, 임의의 주방용품과 직물의 완전한 촉각 상호작용을 시뮬레이션하는 것은 여전히 큰 과제로 남아 있습니다.
실질적인 질문과 실제 가정으로 가는 길
하지만 Memo 방식의 기계가 흔한 가전제품이 되기까지는 익숙한 장애물들이 남아 있습니다. 이 스타트업의 공개 자료와 시연은 유망한 능력을 보여주지만, 독립적인 동료 검토(peer-review)를 통한 검증은 부족한 상태입니다. 주요 질문은 다음과 같습니다.
- 일반화: 로봇이 익숙하지 않은 물체, 기름기가 있거나 젖은 물건, 테스트 주방과는 다른 실제 환경의 지저분한 상태를 얼마나 잘 처리하는가?
- 안전성 및 신뢰성: 세심한 힘 제어가 있더라도 가정 환경은 무질서하다. 소프트웨어가 파지 실패나 실수로 떨어뜨린 상황을 어떻게 감지하고 복구하는가? 전복이나 쏟아짐을 방지하는 안전장치는 무엇인가?
- 비용 및 유지보수: 다수의 센서, 액추에이터, 지원 비용 및 저가형 손의 장기적인 내구성이 도입 여부를 결정할 것이다.
- 개인정보 보호 및 인적 요인: 사적인 공간에서 작동하는 로봇은 데이터 수집, 비디오 스트리밍, 그리고 소유자가 기계의 결정에 대해 어떻게 통제권과 주체성을 유지할 것인지에 대한 문제를 제기한다.
Sunday Robotics는 이러한 우려에 대해 공개적으로 답변하고자 노력해 왔습니다. 공동 창업자인 Tony Zhao는 Memo를 "로봇 AI의 획기적인 변화(step change)"라고 설명하며, 여러 차례의 실시간 시연 동안 시스템이 와인 잔을 하나도 깨뜨리지 않았다고 말했습니다. 그러나 더 넓은 학계와 업계에서는 새로운 접근 방식이 양산 준비가 되었다고 결론 내리기 전에 대개 독립적인 시험, 장기적인 스트레스 테스트, 투명한 고장 모드 보고(failure-mode reporting)를 요구합니다.
광범위한 로봇 생태계에서 Memo의 위치
Memo의 장갑 기반 데이터 수집 방식이 확장 가능하다는 것이 증명된다면, 기업들이 실제 환경의 조작 데이터셋을 수집하는 방식을 재편할 수 있습니다. 로봇 손을 가르치기 위한 저비용 인간 장비는 스타트업이 여러 프로토타입을 저렴하게 반복 실험할 수 있게 하여 주방, 요양원, 소규모 사업장에서의 발전을 가속화할 수 있습니다.
다음 단계와 신중한 전망
Sunday Robotics와 경쟁사들은 시연을 확대하고, 데이터 수집 및 제어 아키텍처에 대한 더 많은 기술적 세부 사항을 발표하며, 파트너 가정이나 요양 시설에서 시범 배치를 시작할 것으로 예상됩니다. 가정용 로봇의 안전을 감독하는 규제 기관과 표준 단체들도 기계가 실험실을 떠나 사적인 공간으로 들어감에 따라 세심한 주의를 기울일 것입니다.
Memo의 시연은 실용적인 전환점을 시사합니다. 완벽한 촉각 시뮬레이션이나 획기적인 하드웨어를 기다리는 대신, 인간에게 저렴한 도구를 제공하여 기계에게 깨지기 쉬운 일상 물체를 다루는 법을 가르치는 것입니다. 인간 데이터와 표적화된 하드웨어의 이러한 결합이 확장된다면, 일부 순수 연구 중심의 접근 방식보다 더 빨리 가정에서 실질적인 도움을 줄 수 있을 것입니다. 그러나 로봇 공학의 많은 진보가 그러했듯, 깔끔한 시연용 주방에서 수백만 개의 거실로 가는 길은 길고 반복적이며 기술적, 사회적 절충안으로 가득할 것입니다.
출처
- Sunday Robotics (기업 시연 및 기술 요약)
- Humanoid (HMND 01 Alpha 프로젝트 자료 및 시연)
- NVIDIA Isaac Sim (시뮬레이션 기반 로봇 학습에 관한 문서)

Comments
No comments yet. Be the first!