Кухонная хореография: робот убирает со стола
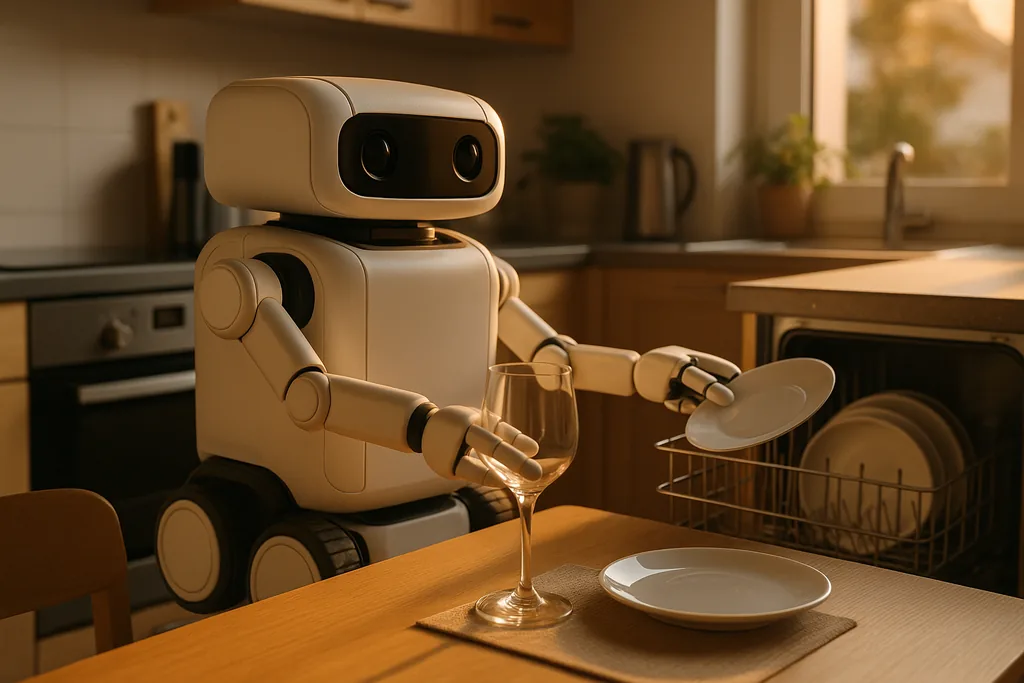
25 ноября 2025 года короткое видео калифорнийского стартапа Sunday Robotics продемонстрировало компактного колесного робота по имени Memo, который подъехал к обеденному столу, собрал тарелки и два винных бокала и загрузил их в посудомоечную машину, ничего не разбив. В последующих кадрах Memo складывал носки и управлял кофемашиной. Компания заявляет, что система повторила эти же действия в ходе более чем 20 живых демонстраций без происшествий — это небольшая, но заметная веха в области, где простые бытовые задачи регулярно ставят в тупик даже самых известных роботов.
Машина на сцене
Memo — это не человекоподобный гуманоид, стоящий на двух ногах: это мобильная база с шарнирным манипулятором и простыми захватами, напоминающими детали Lego. Такой конструкторский выбор сужает инженерную задачу — ванные комнаты и лестницы сложнее кухонь — при этом цель остается понятной большинству людей: создать робота, способного обращаться с хрупкими повседневными предметами разной формы, веса и прочности.
Большая часть последних достижений в робототехнике опирается на один из двух подходов. Первый использует крупномасштабное моделирование и обучение с подкреплением для тренировки контроллеров — этот метод обеспечил быстрый прогресс в локомоции и скоординированном поведении гуманоидов и четвероногих роботов. Второй полагается на телеуправление, при котором эксперты напрямую управляют реальным оборудованием для сбора обучающих данных; этот метод точен, но дорог.
Sunday Robotics заявляет, что Memo идет другим путем. Вместо телеуправления дорогостоящими роботами или использования синтетических данных, компания создала устройства в форме перчаток, соответствующие кистям Memo, и распределила их среди более чем 500 сборщиков данных по всей территории США. Люди в этих перчатках выполняют обычные домашние дела, в то время как система фиксирует силу нажатия, паттерны захвата и движения. Этот набор данных — демонстрации человека, перенесенные на актуаторы робота — обучает Memo имитировать человеческие движения в реальном мире.
Компания утверждает, что этот подход прагматичен: каждая перчатка стоит примерно 200 долларов по сравнению с десятками тысяч долларов, необходимых для оборудования телеуправления, а сбор данных о естественной силе человеческого захвата может помочь преодолеть практические трудности, которые десятилетиями сдерживали развитие роботизированных кистей.
Что Memo может — и чего не может
В демонстрации Memo убирает посуду и столовые приборы со стола и загружит их в посудомоечную машину, поднимает два винных бокала одной рукой, складывает мягкие вещи, например носки, и нажимает кнопки на кофемашине. Эти задачи включают в себя восприятие (распознавание объектов и места их размещения), планирование захвата (выбор места и способа удержания) и контроль силы (насколько сильно нужно сжать хрупкое стекло). Каждая из этих задач до сих пор является актуальной исследовательской проблемой при объединении в единую универсальную систему.
Не менее важно и то, на что Memo не претендует: полная универсальность в любом доме, надежная навигация в загроможденных помещениях или автономность в течение многих часов без присмотра. Демонстрации представляют собой узкоспециализированные домашние задачи в контролируемой среде; они показывают перспективное направление, но это не то же самое, что робот, который немедленно возьмет на себя всю работу по дому.
Почему это важно для ловкости роботов
Исследователи в области робототехники давно указывают на то, что манипуляции с повседневными предметами являются «узким местом» для домашних роботов. Человеческие руки снабжены множеством тактильных датчиков и миллионами лет эволюции проприоцептивного контроля; воспроизвести это в актуаторах и программном обеспечении крайне сложно. Моделирование эффективно для обучения алгоритмов передвижения, где динамику контакта проще описать статистически, но имитация полного тактильного взаимодействия с произвольной кухонной утварью и тканями остается серьезным вызовом.
Практические вопросы и путь в реальные дома
Тем не менее, прежде чем машины типа Memo станут обычным бытовым прибором, предстоит преодолеть ряд известных препятствий. Публичные материалы и демонстрации стартапа указывают на многообещающие возможности, но им не хватает независимой экспертной проверки. Ключевые вопросы включают:
- Обобщение: Насколько хорошо робот справляется с незнакомыми объектами, жирными или мокрыми предметами и реальным беспорядком, который отличается от тестовой кухни?
- Безопасность и надежность: Даже при тщательном контроле силы домашняя среда непредсказуема. Как программное обеспечение обнаруживает неудачные захваты или случайные падения и восстанавливается после них? Какие защитные механизмы предотвращают опрокидывание или разливы?
- Стоимость и обслуживание: Экономическая целесообразность использования множества датчиков и актуаторов, а также долговечность недорогих кистей определят массовость внедрения.
- Конфиденциальность и человеческий фактор: Робот, работающий в частном пространстве, вызывает вопросы о сборе данных, видеопотоках и о том, как владельцы сохраняют контроль над решениями машины.
Sunday Robotics попыталась публично ответить на некоторые опасения: сооснователь Тони Чжао (Tony Zhao) описал Memo как «качественный скачок в ИИ для робототехники» и отметил, что система не разбила ни одного винного бокала в ходе нескольких живых демонстраций. Однако профессиональное сообщество обычно ожидает независимых испытаний, долгосрочных стресс-тестов и прозрачной отчетности о сбоях, прежде чем делать вывод о готовности нового подхода к серийному производству.
Место Memo в более широкой экосистеме роботов
Если метод сбора данных с помощью перчаток Memo окажется масштабируемым, это может изменить способы сбора наборов данных для манипуляций в реальном мире. Недорогое оснащение людей инструментами для обучения роботизированных рук может позволить стартапам экономно работать над множеством прототипов, ускоряя прогресс в оснащении кухонь, домов престарелых и малых предприятий.
Следующие шаги и осторожный прогноз
Стоит ожидать, что Sunday Robotics и ее конкуренты расширят программу демонстраций, опубликуют больше технических подробностей об архитектурах сбора данных и управления, а также начнут пилотные развертывания в домах партнеров или учреждениях по уходу. Регуляторы и группы по стандартизации, курирующие безопасность бытовых роботов, вероятно, будут внимательно следить за тем, как машины покидают лаборатории и входят в частные пространства.
Демонстрация Memo знаменует собой прагматичный разворот: вместо того чтобы ждать идеального тактильного моделирования или прорывного оборудования, нужно дать людям недорогие инструменты для обучения машин обращению с хрупкими повседневными предметами. Если этот гибрид человеческих данных и специализированного оборудования удастся масштабировать, он сможет принести практическую пользу в домах раньше, чем некоторые чисто исследовательские подходы. Но, как и в случае со многими достижениями в робототехнике, путь от аккуратной демонстрационной кухни до миллионов гостиных будет долгим, итеративным и полным технических и социальных компромиссов.
Источники
- Sunday Robotics (демонстрация компании и технические резюме)
- Humanoid (материалы и демонстрации проекта HMND 01 Alpha)
- NVIDIA Isaac Sim (документация по обучению роботов на основе симуляции)

Comments
No comments yet. Be the first!