Koreografi i köket: en robot dukar av bordet
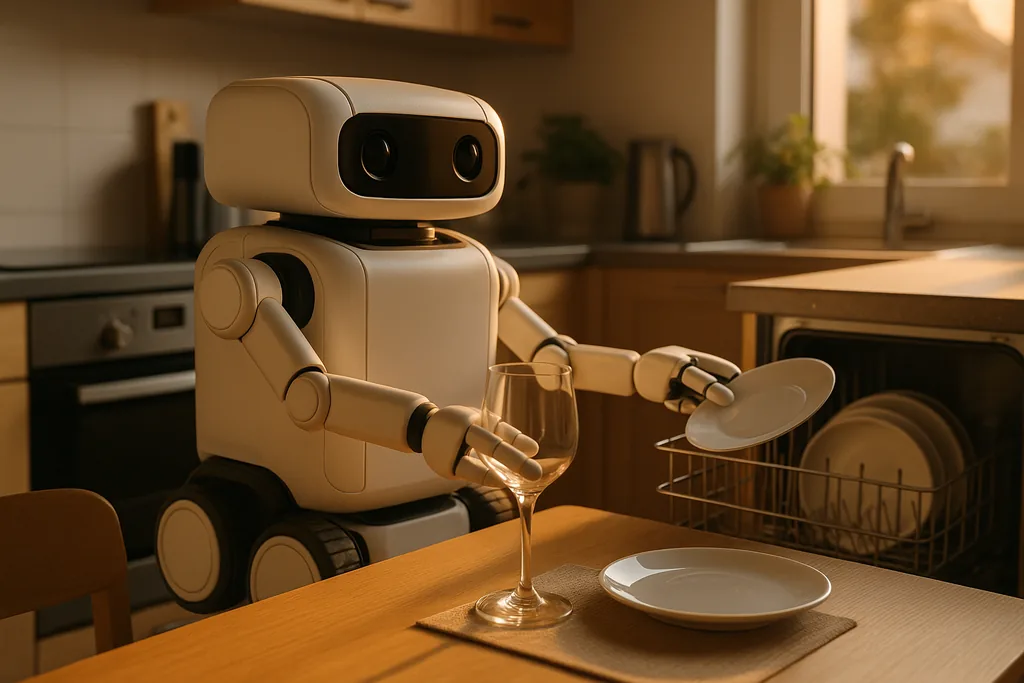
Den 25 november 2025 visade en kort video från det Kalifornien-baserade startup-företaget Sunday Robotics hur en kompakt, hjulgående robot vid namn Memo rullade fram till ett matbord, plockade upp tallrikar och två vinglas, och ställde in dem i en diskmaskin utan att ha sönder något. I efterföljande klipp vek Memo strumpor och hanterade en espressomaskin. Företaget uppger att systemet har upprepat samma bedrifter i fler än 20 livedemonstrationer utan incidenter – en liten men slående milstolpe inom ett fält där enkla hushållssysslor rutinmässigt besegrar högprofilerade robotar.
Maskinen på scenen
Memo är inte en människoliknande humanoid som står på två ben: det är en mobil bas med en ledad arm och enkla, Lego-liknande händer. Det designvalet smalnar av det ingenjörstekniska problemet – badrum och trappor är svårare än kök – samtidigt som målet förblir bekant för de flesta: en robot som hanterar ömtåliga vardagsföremål som varierar i form, vikt och bräcklighet.
De flesta framsteg inom robotik på senare tid har lutat sig mot ett av två läger. Det ena använder storskalig simulering och förstärkningsinlärning (reinforcement learning) för att träna styrenheter – ett tillvägagångssätt som har lett till snabba framsteg inom lokomotion och koordinerade beteenden för humanoider och fyrbenta robotar. Det andra förlitar sig på teleoperation, där experter direkt styr verklig robothårdvara för att samla in träningsdata; det är exakt men dyrt.
Sunday Robotics menar att Memo följer en annan väg. Istället för att fjärrstyra dyra robotar eller förlita sig på syntetiska data, byggde företaget handskformade enheter anpassade efter Memos händer och distribuerade dem till fler än 500 mänskliga datainsamlare över hela USA. Personer som bär handskarna utför normala hushållssysslor medan systemet registrerar krafter, greppmönster och rörelser. Detta dataset – mänskliga demonstrationer mappade till robotens ställdon – tränar Memo att efterlikna mänsklig hantering i den verkliga världen.
Företaget hävdar att detta tillvägagångssätt är pragmatiskt: varje handske kostar ungefär 200 dollar jämfört med de tiotusentals dollar som krävs för teleopererad robothårdvara, och att samla in naturliga mänskliga kraftmätningar kan överbrygga några av de praktiska gap som har hämmat robothänder i årtionden.
Vad Memo kan – och inte kan – göra
I demonstrationen plockar Memo bort disk och bestick från ett bord och laddar dem i diskmaskinen, lyfter två vinglas med en hand, viker mjuka föremål som strumpor och trycker på knappar på en espressomaskin. Dessa uppgifter involverar perception (att känna igen objekt och var de ska placeras), grepplanering (att välja var och hur man ska greppa) och kraftstyrning (hur hårt man ska klämma om bräckligt glas). Var och en av dessa är fortfarande ett pågående forskningsproblem när de kombineras i ett enda, generellt system.
Lika anmärkningsvärt är vad Memo inte gör anspråk på: full generalitet i varje hushåll, robust navigering genom stökiga hem eller autonomi i timmar utan tillsyn. Demonstrationerna är strikt avgränsade hushållsuppgifter i kontrollerade miljöer; de visar en lovande riktning men är inte detsamma som en robot som omedelbart tar över allt hushållsarbete.
Varför detta är viktigt för robotars fingerfärdighet
Robotikforskare har länge pekat på hantering av vardagsföremål som flaskhalsen för hemrobotar. Mänskliga händer är fullpackade med taktila sensorer och miljontals år av proprioceptiv kontroll; att återskapa det i ställdon och mjukvara är kostsamt. Simulering är kraftfullt för att träna lokomotionspolicyer där kontaktdynamik är lättare att modellera statistiskt, men att simulera den fullständiga taktila interaktionen för godtycklig köksutrustning och tyger förblir en stor utmaning.
Praktiska frågor och vägen till riktiga hem
Det finns dock välbekanta hinder innan maskiner av Memos typ blir en vanlig hushållsapparat. Startup-företagets offentliga material och demonstrationer tyder på lovande förmåga men saknar oberoende, fackgranskad validering. Viktiga frågor inkluderar:
- Generalisering: Hur väl hanterar roboten okända föremål, feta eller våta föremål och verklig oreda som skiljer sig från ett testkök?
- Säkerhet och tillförlitlighet: Även med noggrann kraftstyrning är hushållsmiljöer stökiga. Hur upptäcker och återhämtar sig mjukvaran från misslyckade grepp eller oavsiktliga tapp? Vilka säkerhetsåtgärder förhindrar vältning eller spill?
- Kostnad och underhåll: Ekonomin kring flera sensorer, ställdon och support – samt den långsiktiga hållbarheten hos billiga händer – kommer att avgöra genomslaget.
- Integritet och mänskliga faktorer: En robot som arbetar i privata utrymmen väcker frågor om datainsamling, videoströmmar och hur ägare behåller kontroll och agens över maskinens beslut.
Sunday Robotics har försökt bemöta vissa farhågor offentligt: medgrundaren Tony Zhao beskrev Memo som en "språngvis förändring inom robot-AI" och sa att systemet inte hade haft sönder några vinglas under flera livedemonstrationer. Men det bredare forskarsamhället efterfrågar vanligtvis oberoende tester, långsiktiga stresstester och transparent rapportering av fellägen innan man drar slutsatsen att en ny metod är redo för produktion.
Var Memo kan passa in i det bredare robot-ekosystemet
Om Memos handskbaserade datainsamling visar sig vara skalbar kan det omforma hur företag samlar in dataset för manipulation i den verkliga världen. Billig mänsklig instrumentering för att lära robothänder kan göra det möjligt för nystartade företag att iterera prisvärt på flera prototyper, vilket påskyndar framstegen i kök, vårdhem och småföretag.
Nästa steg och en försiktig framtidsutsikt
Räkna med att Sunday Robotics och dess konkurrenter utökar sina demonstrationer, publicerar fler tekniska detaljer om datainsamling och kontrollarkitekturer, och påbörjar testutplaceringar i partnerhem eller vårdinrättningar. Regulatorer och standardiseringsgrupper som övervakar säkerhet för hemrobotar kommer sannolikt att hålla ögonen öppna när maskiner lämnar laboratorier och går in i privata miljöer.
Memos demo markerar en pragmatisk vändning: istället för att vänta på perfekt taktil simulering eller banbrytande hårdvara, ger man människor billiga verktyg för att lära maskiner hur man hanterar ömtåliga vardagsföremål. Om den hybriden av mänskliga data och riktad hårdvara kan skalas upp, kan den leverera praktisk hjälp i hemmen snabbare än vissa rent forskningsdrivna metoder. Men som med många framsteg inom robotik kommer vägen från ett städat demokök till miljontals vardagsrum att vara lång, iterativ och fylld av tekniska och sociala avvägningar.
Källor
- Sunday Robotics (företagsdemonstration och tekniska sammanfattningar)
- Humanoid (HMND 01 Alpha-projektmaterial och demonstrationer)
- NVIDIA Isaac Sim (dokumentation om simuleringsdriven robotträning)

Comments
No comments yet. Be the first!