厨房编舞:机器人清理餐桌
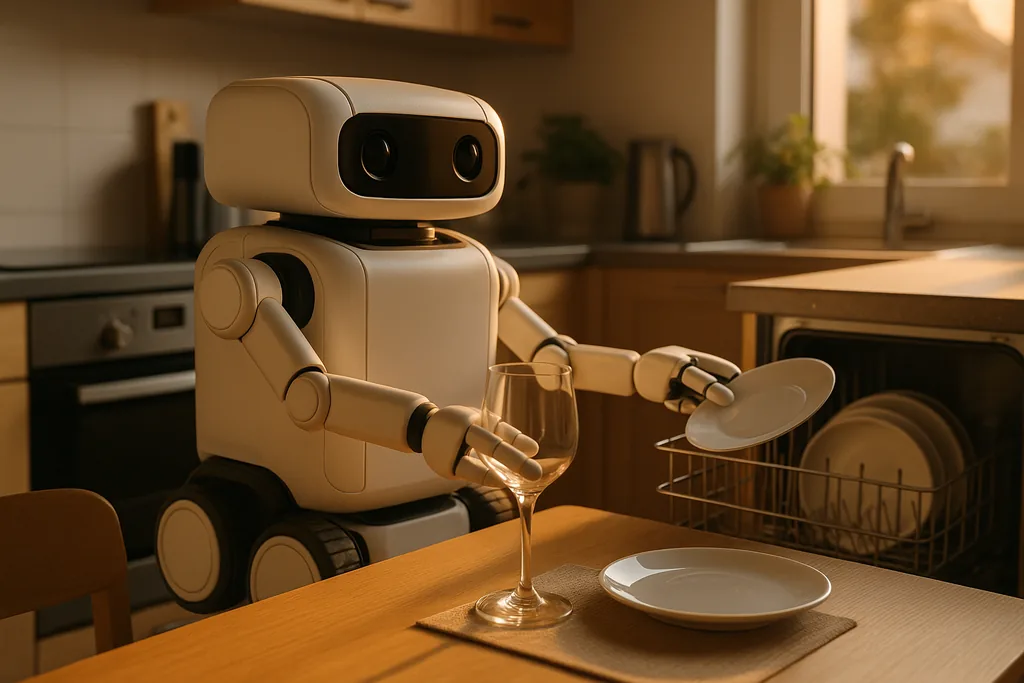
2025年11月25日,来自加利福尼亚州的初创公司 Sunday Robotics 发布了一段短视频,展示了一款名为 Memo 的紧凑型轮式机器人。视频中,它滚向餐桌,拿起盘子和两个酒杯,将它们放入洗碗机中,且没有损坏任何东西。在随后的片段中,Memo 叠了袜子并操作了浓缩咖啡机。该公司表示,该系统在20多次现场演示中重复了同样的动作,未发生任何事故——这在简单的家务任务经常难倒知名机器人的领域,是一个虽小但引人注目的里程碑。
舞台上的机器
Memo 并非站在双脚上的类人型机器人:它是一个带有机械臂和类似 Lego 般简单手掌的移动底座。这一设计选择缩小了工程问题的范围——浴室和楼梯比厨房更难处理——同时保持了大多数人熟悉的目标:一个能够处理形状、重量和易碎程度各异的脆弱日常物品的机器人。
最近 robotics 的大多数进展主要依赖于两个阵营。一种使用大规模仿真和强化学习(reinforcement learning)来训练控制器——这种方法在类人机器人和四足机器人的运动和协调行为方面取得了快速进步。另一种依赖于远程操作(teleoperation),由专家直接引导真实的机器人硬件来收集教学数据;这种方法虽然精确但成本高昂。
Sunday Robotics 表示 Memo 走的是一条不同的道路。该公司没有远程操作昂贵的机器人或依赖合成数据,而是制造了与 Memo 手部匹配的手套装置,并将其分发给全美500多名人类数据收集者。佩戴手套的人员进行正常的日常家务操作,同时系统记录力度、抓握模式和动作。这一数据集——映射到机器人执行器(actuators)上的人类演示——训练 Memo 模仿现实世界中人类的搬运方式。
公司认为这种方法很务实:每只手套的成本约为200美元,而远程操作机器人硬件则需要数万美元;收集自然的人类力度测量数据可能会弥合数十年来阻碍机器人手部发展的某些实际差距。
Memo 能做什么,不能做什么
在演示中,Memo 从桌子上收走餐具和刀叉并装入洗碗机,单手提起两个酒杯,折叠袜子等柔软物品,并按下浓缩咖啡机的按钮。这些任务涉及感知(识别物体及其放置位置)、抓取规划(选择抓取位置和方式)以及力度控制(对易碎玻璃挤压多大力量)。当这些功能结合在一个单一的通用系统中时,每一项都仍然是目前的研究难题。
同样值得注意的是 Memo 并未声称拥有的能力:在所有家庭中的完全通用性、在凌乱家中的稳健导航,或在无人监督的情况下自主运行数小时。这些演示是在受控环境下进行的针对性家务任务;它们展示了一个充满希望的方向,但并不等同于能够立即接管所有家务的机器人。
为什么这对机器人灵巧性至关重要
机器人研究人员长期以来一直指出,日常物品的操作(manipulation)是家用机器人的瓶颈。人类的双手布满了触觉传感器,并拥有数百万年的本体感觉(proprioceptive)控制;在执行器和软件中复制这一点成本很高。仿真对于训练运动策略非常强大,因为接触动力学更容易进行统计建模,但模拟任意厨具和织物的完整触觉交互仍然是一项重大挑战。
实际问题与通往真实家庭之路
然而,在 Memo 式机器成为常见的家用电器之前,还存在一些常见的障碍。这家初创公司的公开材料和演示显示出了大有可为的能力,但尚缺乏独立的同行评审验证。关键问题包括:
- 通用化:机器人如何处理不熟悉的物体、油腻或潮湿的物品,以及与测试厨房不同的现实世界杂乱环境?
- 安全与可靠性:即使有精细的力度控制,家庭环境也是混乱的。软件如何检测并从抓取失败或意外跌落中恢复?有哪些安全措施可以防止倾覆或溢出?
- 成本与维护:多个传感器、执行器和支持的经济性,以及低成本手部的长期耐用性,将决定其普及程度。
- 隐私与人为因素:在私人空间运行的机器人引发了关于数据收集、视频流以及所有者如何保持对机器决策的控制权和代理权的问题。
Sunday Robotics 已公开回应了一些担忧:联合创始人 Tony Zhao 将 Memo 描述为“机器人人工智能领域的阶梯式变革”,并表示该系统在多次现场演示中都没有打破过酒杯。但更广泛的社区通常会寻求独立的试验、长期的压力测试和透明的故障模式报告,然后才会得出这种新方法已准备好投入生产的结论。
Memo 在更广泛机器人生态系统中的位置
如果 Memo 基于手套的数据收集被证明是可扩展的,它可能会重塑公司收集现实世界操作数据集的方式。用于教导机器人手的低成本人类设备可能允许初创公司在多个原型上进行负担得起的迭代,从而加速厨房、养老院和小型企业的进步。
后续步骤与谨慎展望
预计 Sunday Robotics 及其竞争对手将扩大演示规模,发布更多关于数据收集和控制架构的技术细节,并开始在合作伙伴的家庭或护理机构中进行试点部署。随着机器离开实验室进入私人空间,负责监督家用机器人安全的监管机构和标准组织可能会密切关注。
Memo 的演示标志着一个务实的转型:与其等待完美的触觉仿真或突破性的硬件,不如给人类廉价的工具来教机器如何处理脆弱的日常物品。如果这种人类数据和目标硬件的混合模式能够扩展,它可能比一些纯研究驱动的方法更早地为家庭提供实际帮助。但是,与机器人技术的许多进步一样,从整洁的演示厨房到数百万个起居室的道路将是漫长、迭代且充满技术和社会权衡的。
来源
- Sunday Robotics(公司演示和技术摘要)
- Humanoid (HMND 01 Alpha 项目资料和演示)
- NVIDIA Isaac Sim (关于仿真驱动机器人训练的文档)

Comments
No comments yet. Be the first!