
Endüstriyel otomasyonun gelişen dünyasında robotlar, gelişmiş bilgisayarlı görü sistemleri rehberliğinde tekrarlayan ve yüksek hızlı görevleri yerine getirmede dikkate değer bir yetkinlik sergilemişlerdir. Ancak, ince bir kabloyu bir konektöre takmak veya hassas elektronik bileşenleri monte etmek gibi "temas yoğun" senaryolarla karşılaşıldığında, en gelişmiş görsel sistemler bile genellikle bir tıkanma noktasına ulaşır. Bu görevler sadece görmekten fazlasını; nüanslı bir dokunma duyusu ve fiziksel direncin anlaşılmasını gerektirir. Bu duyusal boşluğu kapatmak için Tailai Cheng, Fan Wu ve Kejia Chen liderliğindeki bir araştırma ekibi, insan gösterimleri sırasında kuvvet ve dokunsal geri bildirimin karmaşık etkileşimini yakalamak üzere tasarlanmış çok modlu bir el arayüzü olan TacUMI'yi geliştirdi. Bu sistem, robotların karmaşık fiziksel etkileşimleri nasıl öğrenebileceğine dair yeni bir yol haritası sunuyor.
Sadece Görüntü Odaklı Robotik Sistemlerin Sınırları
Modern robot öğrenimindeki temel zorluk, fiziksel etkileşimin "kara kutusunda" yatmaktadır. Diffusion Policy ve ACT gibi mevcut çerçeveler kısa süreli görevlerde başarı göstermiş olsa da, genellikle bir gösterimi monolitik bir veri bloğu olarak ele alırlar. Kablo montajı gibi karmaşık ve uzun süreli görevler için görsel gözlemler ve robotun kendi uzuv konumuna dair dahili duyusu olan propriyoseptif veriler genellikle yetersiz kalır. Örneğin, bir insan operatör bir kabloyu yuvaya yerleştirmeden önce gerginlik yaratmak için gerdiğinde, görsel değişim ihmal edilebilir düzeyde olsa da görevin fiziksel durumu önemli ölçüde değişmiş olur. Bu gerginliği "hissetme" yeteneği olmayan bir robot, operasyonun farklı aşamaları arasındaki geçişi tanımlamakta zorlanır ve bu da ortam eğitim verilerinden en ufak bir sapma gösterdiğinde başarısızlığa yol açar.
TacUMI ile Tanışın: Çok Modlu Bir Atılım
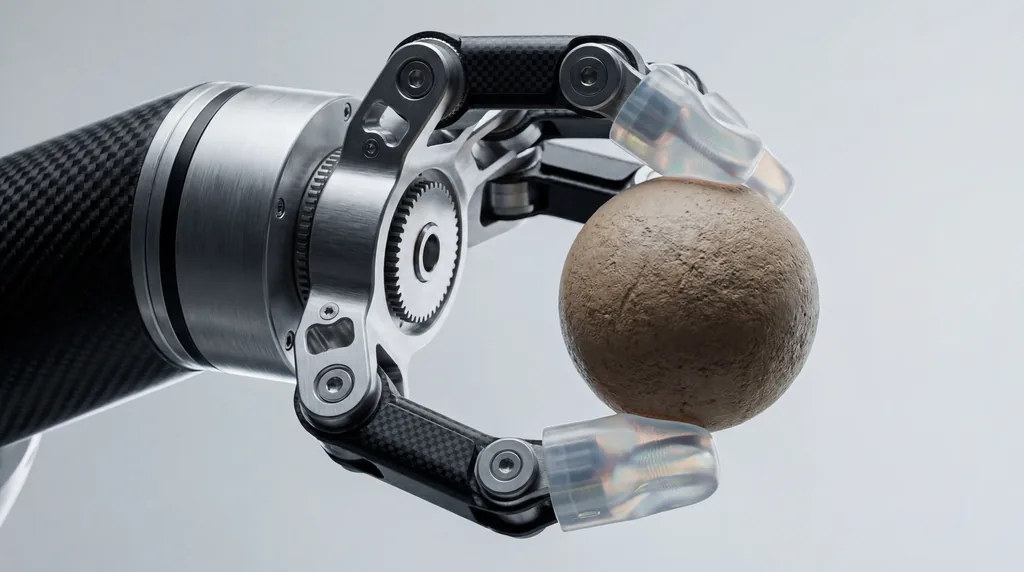
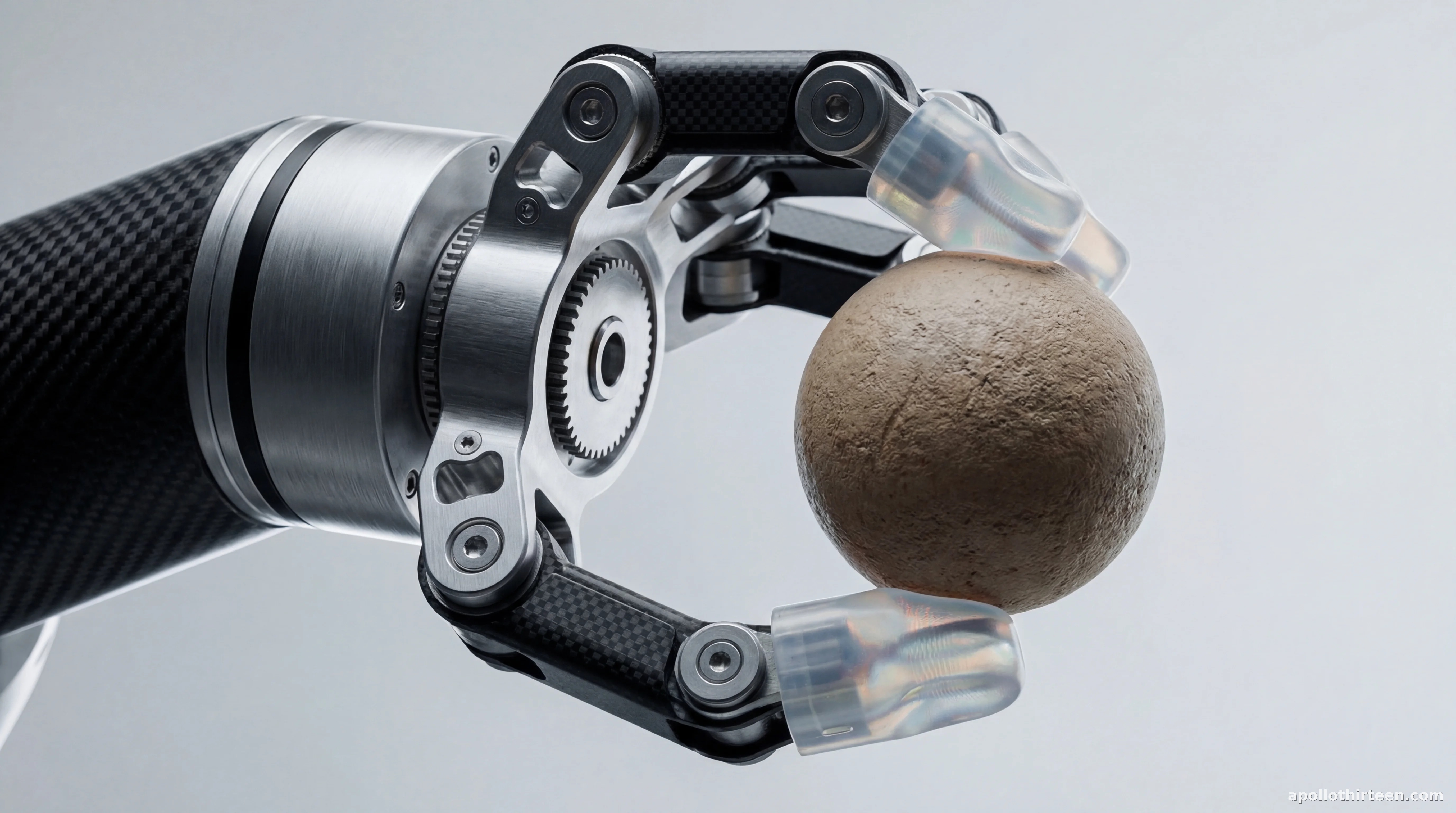
Münih Teknik Üniversitesi (Technical University of Munich), Agile Robots SE ve Nanjing ile Shanghai Üniversitelerindeki ortaklarından araştırmacılar, temel Evrensel Manipülasyon Arayüzü (Universal Manipulation Interface - UMI) üzerine inşa edilen TacUMI'yi tanıttı. Bu sistem, yüksek doğruluklu veri toplama için tasarlanmış, robotla uyumlu ve kompakt bir tutucudur. Kameralara ve SLAM tabanlı (Eşzamanlı Konumlandırma ve Haritalama) poz tahminine büyük ölçüde güvenen öncüllerinden farklı olarak TacUMI, bir dizi özel sensörü entegre eder: yüksek çözünürlüklü dokunsal haritalama için parmak uçlarındaki ViTac sensörleri, bilekte altı serbestlik dereceli (6D) bir kuvvet-tork sensörü ve yüksek hassasiyetli bir 6D poz izleyici. Bu düzenek; görsel, kuvvet ve dokunsal modalitelerin senkronize bir şekilde elde edilmesini sağlayarak insan becerisinin zengin ve çok boyutlu bir veri kümesini oluşturur.
İnsan Dokunuşunu Yakalamak
TacUMI'nin donanım tasarımı, el tipi gösterim cihazlarıyla tipik olarak ilişkilendirilen "gürültüyü" ortadan kaldırmak için özel olarak mühendislikten geçirilmiştir. Öne çıkan özelliklerinden biri, sürekli kilitlenebilir çene mekanizmasıdır. Geleneksel el tipi cihazlarda, insan operatörün tutuşu sürdürmek için uyguladığı kuvvet, sensörlerin alet ile nesne arasındaki gerçek etkileşim kuvvetlerini kaydetme yeteneğini engelleyebilir. TacUMI, bir nesne sabitlendikten sonra operatörün tutucuyu kilitlemesine izin vererek, kuvvet-tork sensörlerinin yalnızca görevin kendisine ait temiz etkileşim verilerini kaydetmesini sağlar. Bu, insanların hassas görevleri doğal bir şekilde sergilemesine olanak tanırken, cihazın deforme olabilen doğrusal nesne (DLO) manipülasyonunda bulunanlar gibi yüksek gerilimli etkileşimleri kayma veya sensör kirliliği olmadan yakalamasını sağlar.
Semantik Bölümleme ve Görev Ayrıştırma
Araştırmanın temel katkılarından biri, zamansal modelleri, özellikle de Çift Yönlü Uzun Kısa Süreli Bellek (BiLSTM) ağını kullanan çok modlu bir bölümleme çerçevesinin geliştirilmesidir. Bu çerçevenin amacı, uzun süreli gösterimleri anlamsal olarak anlamlı "becerilere" veya modüllere ayırmaktır. Model; dokunsal, kuvvet ve görsel verilerin senkronize akışlarını işleyerek olay sınırlarını tespit edebilir: bir kablonun kavrandığı an, gerginliğin uygulandığı an ve başarıyla yerine oturtulduğu an gibi. Bu ayrıştırma, robotun önce bireysel motor becerileri öğrendiği ve ardından bunları etkili bir şekilde sıralamak için üst düzey bir koordinatör öğrendiği hiyerarşik öğrenme için kritiktir. Bu durum, öğrenme sürecini uçtan uca yaklaşımlardan daha ölçeklenebilir ve yorumlanabilir hale getirir.
Örnek Olay İncelemesi: Hassas Elektronik Montajında Ustalaşmak
TacUMI'nin etkinliğini doğrulamak için araştırmacılar sistemi, otomatize edilmesi zor olan elektronik montajının temel taşlarından biri olan zorlu bir kablo montaj görevinde değerlendirdiler. Deney, operatörün bir kabloyu almasını, karmaşık bir ortamda ilerlemesini, belirli bir gerginlik oluşturmasını ve konektörü hassas bir yuvaya yerleştirmesini gerektiriyordu. Sonuçlar çarpıcıydı: sistem yüzde 90'ın üzerinde bölümleme doğruluğu elde etti. Daha da önemlisi araştırma, daha fazla modalite eklendikçe performansta belirgin bir artış olduğunu vurguladı. Sadece görüntüye dayalı modeller genellikle "gerginlik verme" ve "yerleştirme" aşamalarını ayırt etmekte başarısız olurken, dokunsal ve kuvvet verilerinin dahil edilmesi modelin geçiş sınırlarını yüksek hassasiyetle belirlemesini sağladı. Bu da çok modlu algılamanın temas yoğun görevleri anlamak için temel olduğunu kanıtladı.
Çok Kurumlu İş Birliğinin Rolü
TacUMI'nin geliştirilmesi, birkaç prestijli kurum arasındaki önemli bir iş birliğini temsil ediyor. Hem Münih Teknik Üniversitesi hem de Agile Robots SE ile bağlantılı olan baş yazar Tailai Cheng; donanım-yazılım entegrasyonunu geliştirmek için Kejia Chen, Lingyun Chen ve diğer meslektaşlarıyla birlikte çalıştı. Shanghai Üniversitesi'nden Fan Wu ve Nanjing Üniversitesi'nden Zhenshan Bing'in katkıları, sistemin farklı veri toplama yöntemleri arasında genelleme yapmasını sağlayan algoritmik çerçevenin geliştirilmesinde etkili oldu. İlginç bir şekilde araştırmacılar, TacUMI ile toplanan veriler üzerinde eğitilen bir modelin, geleneksel robotik teleoperasyon yoluyla toplanan veri kümelerinde de konuşlandırılabileceğini, benzer doğruluğa ulaşılabileceğini ve sistemin farklı robotik yapılar arasındaki çok yönlülüğünü gösterdiğini kanıtladılar.
Gösterimle Robot Öğrenimi İçin Gelecek Yönelimleri
TacUMI arayüzünün başarısı, Gösterimle Robot Öğrenimi (LfD) alanı için birkaç yeni yol açıyor. Yüksek kaliteli, çok modlu verilerin ölçeklenebilir şekilde toplanması için pratik bir temel sağlayan sistem, otonom sistemlerde insan benzeri dokunsal duyarlılığa ulaşma konusunda çıtayı yükseltiyor. Araştırmacılar, sonraki adımların TacUMI'yi yumuşak malzeme taşıma ve karmaşık çoklu alet montajı gibi daha çeşitli ve öngörülemeyen endüstriyel uygulamalara ölçeklendirmeyi içerdiğini belirtiyor. Robotlar katı fabrika ortamlarından çıkıp daha dinamik ortamlara girdikçe, TacUMI gibi cihazlar tarafından kolaylaştırılan bir görev boyunca "hissederek" ilerleme yeteneği, muhtemelen görme yeteneği kadar temel hale gelecektir.
Robotik Endüstrisi İçin Çıkarımlar
Daha geniş robotik endüstrisi için TacUMI, pahalı ve hantal teleoperasyon kurulumlarına olan bağımlılıktan uzaklaşılacağına dair bir işaret veriyor. Karmaşık dokunsal verileri toplama eşiğini düşüren bu el tipi arayüz, robot eğitiminde daha hızlı yinelemeye olanak tanıyor. Hata maliyetinin yüksek ve görev karmaşıklığının muazzam olduğu elektronik üretimi ve ev hizmetleri gibi sektörlerde, uzun süreli eylemleri öğrenilebilir, dokunsal bilgiye dayalı modüllere ayırma yeteneği, otonom çözümleri devreye almak için gereken süreyi önemli ölçüde azaltabilir. Fan Wu ve araştırma ekibinin belirttiği gibi, bu duyusal modalitelerin entegrasyonu sadece teknik bir yükseltme değil; dokunma ve dirençle tanımlanan fiziksel bir dünyada çalışması beklenen robotlar için gerekli bir evrimdir.

{kind=link}
Comments
No comments yet. Be the first!