
산업 자동화의 진화하는 지형 속에서 로봇은 정교한 컴퓨터 비전의 안내를 받아 반복적이고 고속인 작업을 수행하는 데 탁월한 능력을 보여주었습니다. 하지만 커넥터에 가는 와이어를 끼우거나 섬세한 전자 부품을 조립하는 것과 같은 "접촉 집약적(contact-rich)" 시나리오에 직면하면 가장 진보된 시각 시스템조차 한계에 부딪히는 경우가 많습니다. 이러한 작업에는 단순한 시각 그 이상의 것이 필요합니다. 즉, 미묘한 촉각과 물리적 저항에 대한 이해가 요구됩니다. 이러한 감각적 격차를 해소하기 위해 Tailai Cheng, Fan Wu, Kejia Chen이 이끄는 연구팀은 인간의 시연 과정에서 힘과 촉각 피드백의 복잡한 움직임을 포착하도록 설계된 다중 모드 핸드헬드 인터페이스인 TacUMI를 개발하여, 로봇이 복잡한 물리적 상호작용을 학습할 수 있는 새로운 청사진을 제공했습니다.
시각 전용 로봇 공학의 한계
현대 로봇 학습의 근본적인 과제는 물리적 상호작용의 "블랙박스"에 있습니다. Diffusion Policy 및 ACT와 같은 현재의 프레임워크는 단기 과제에서 성공을 거두었지만, 시연을 단일 데이터 블록으로 취급하는 경우가 많습니다. 케이블 장착과 같은 복잡한 장기 과제의 경우, 시각적 관찰과 로봇의 고유 수용성 데이터(로봇 자신의 팔 위치에 대한 내부 감각)만으로는 불충분할 때가 많습니다. 예를 들어, 인간 작업자가 케이블을 슬롯에 삽입하기 전 텐션을 주기 위해 잡아당길 때 시각적 변화는 미미할 수 있지만, 작업의 물리적 상태는 크게 변화한 것입니다. 이러한 텐션을 "느낄" 수 있는 능력이 없다면, 로봇은 작업의 서로 다른 단계 사이의 전환점을 식별하는 데 어려움을 겪게 되며, 환경이 훈련 데이터에서 조금이라도 벗어나면 실행에 실패하게 됩니다.
TacUMI 소개: 다중 모드 기술의 돌파구
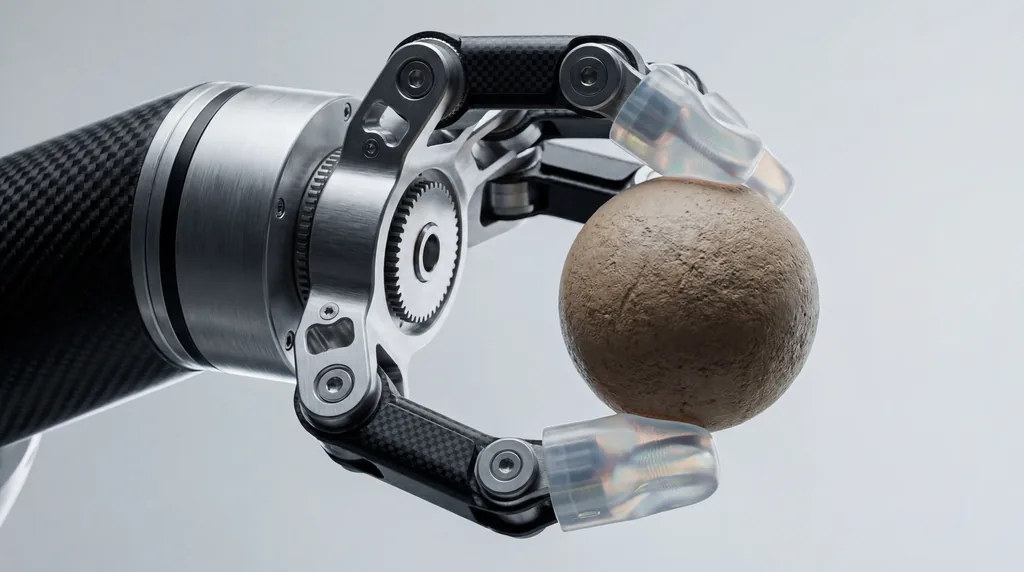
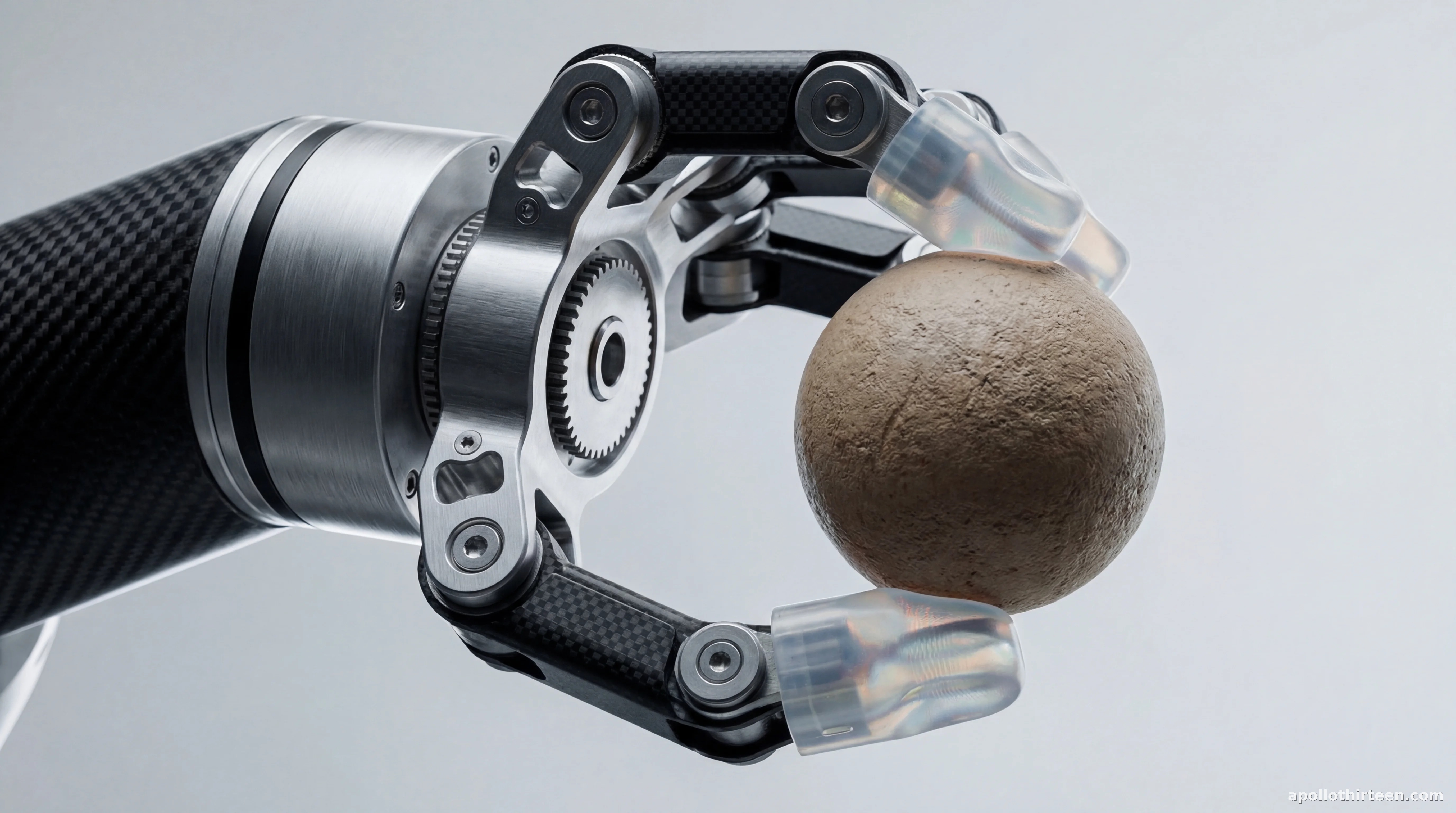
범용 조작 인터페이스(Universal Manipulation Interface, UMI)의 기초 위에 구축된 뮌헨 공과대학교(Technical University of Munich), Agile Robots SE, 그리고 난징 및 상하이 대학교의 파트너 연구원들은 TacUMI를 선보였습니다. 이 시스템은 고충실도 데이터 수집을 위해 설계된 컴팩트하고 로봇 호환이 가능한 그리퍼입니다. 카메라와 SLAM(동시적 위치 추정 및 지도 작성) 기반 포즈 추정에 크게 의존했던 이전 모델들과 달리, TacUMI는 일련의 특수 센서를 통합합니다. 손가락 끝에는 고해상도 촉각 매핑을 위한 ViTac 센서, 손목에는 6자유도(6D) 힘-토크 센서, 그리고 고정밀 6D 포즈 트래커가 탑재되어 있습니다. 이러한 조합을 통해 시각, 힘, 촉각 모달리티를 동기화하여 획득할 수 있으며, 인간의 정교한 솜씨를 담은 풍부하고 다차원적인 데이터셋을 생성합니다.
인간의 손길을 포착하다
TacUMI의 하드웨어 디자인은 핸드헬드 시연 장치와 관련된 일반적인 "노이즈"를 제거하도록 정교하게 설계되었습니다. 눈에 띄는 특징 중 하나는 지속적으로 잠금 가능한 조(jaw) 메커니즘입니다. 기존의 핸드헬드 장치에서는 인간 작업자가 파지력을 유지하기 위해 가하는 힘이 도구와 물체 사이의 실제 상호작용 힘을 기록하는 센서의 능력을 방해할 수 있습니다. TacUMI는 물체가 고정되면 작업자가 그리퍼를 잠글 수 있게 함으로써, 힘-토크 센서가 작업 자체의 순수한 상호작용 데이터만을 기록하도록 보장합니다. 이를 통해 인간은 섬세한 작업을 자연스럽게 시연할 수 있으며, 장치는 미끄러짐이나 센서 오염 없이 변형 가능한 선형 물체(DLO) 조작에서 발견되는 높은 텐션의 상호작용을 포착할 수 있습니다.
시맨틱 세그멘테이션 및 작업 분해
이 연구의 핵심 기여는 시계열 모델, 특히 양방향 장단기 메모리(BiLSTM) 네트워크를 활용하는 다중 모드 세그멘테이션 프레임워크의 개발입니다. 이 프레임워크의 목표는 장기 시연을 의미론적으로 유의미한 "기술(skills)" 또는 모듈로 분해하는 것입니다. 촉각, 힘, 시각 데이터의 동기화된 스트림을 처리함으로써 모델은 이벤트 경계, 즉 케이블을 잡는 정확한 순간, 텐션이 가해지는 순간, 그리고 성공적으로 장착되는 순간을 감지할 수 있습니다. 이러한 분해는 계층적 학습에 매우 중요합니다. 로봇이 먼저 개별 운동 기술을 학습한 다음, 이를 효과적으로 배열하는 상위 수준의 코디네이터를 학습함으로써, 엔드투엔드(end-to-end) 방식보다 학습 과정을 더 확장 가능하고 해석 가능하게 만듭니다.
사례 연구: 섬세한 전자 제품 조립 마스터하기
TacUMI의 효능을 검증하기 위해 연구진은 자동화하기 어려운 전자 제품 조립의 핵심 작업인 까다로운 케이블 장착 과제에서 시스템을 평가했습니다. 실험에서 작업자는 케이블을 집어 들고, 복잡한 환경을 탐색하고, 특정 텐션을 생성한 다음, 정밀한 하우징에 커넥터를 삽입해야 했습니다. 결과는 놀라웠습니다. 시스템은 90% 이상의 세그멘테이션 정확도를 달성했습니다. 결정적으로, 연구는 더 많은 모달리티가 추가됨에 따라 성능이 현저하게 향상된다는 점을 강조했습니다. 시각 전용 모델은 "텐션 부여" 단계와 "삽입" 단계를 구분하지 못하는 경우가 많았지만, 촉각 및 힘 데이터의 포함을 통해 모델은 높은 정밀도로 전환 경계를 찾아낼 수 있었으며, 이는 접촉 집약적인 작업을 이해하는 데 다중 모드 감지 기능이 필수적임을 증명했습니다.
다기관 협력의 역할
TacUMI의 개발은 여러 명문 기관 간의 긴밀한 협력을 의미합니다. 뮌헨 공과대학교와 Agile Robots SE에 소속된 주저자 Tailai Cheng은 Kejia Chen, Lingyun Chen 및 다른 동료들과 함께 하드웨어-소프트웨어 통합을 개선하기 위해 협력했습니다. 상하이 대학교의 Fan Wu와 난징 대학교의 Zhenshan Bing의 기여는 시스템이 서로 다른 데이터 수집 방법 전반에 걸쳐 일반화될 수 있도록 하는 알고리즘 프레임워크를 개발하는 데 중추적인 역할을 했습니다. 흥미롭게도 연구진은 TacUMI로 수집된 데이터로 훈련된 모델을 전통적인 로봇 원격 조작을 통해 수집된 데이터셋에 배포할 수 있음을 보여주었으며, 대등한 정확도를 달성하여 다양한 로봇 구현체에 대한 시스템의 다재다능함을 입증했습니다.
시연을 통한 로봇 학습의 미래 방향
TacUMI 인터페이스의 성공은 시연을 통한 로봇 학습(LfD) 분야에 여러 새로운 길을 열어주었습니다. 고품질 다중 모드 데이터를 대규모로 수집할 수 있는 실용적인 기반을 제공함으로써, 이 시스템은 자율 시스템에서 인간과 같은 촉각 민감도를 달성하는 데 한 걸음 더 다가섰습니다. 연구진은 다음 단계로 부드러운 재료 취급 및 복잡한 다중 도구 조립과 같이 더욱 다양하고 예측 불가능한 산업 응용 분야로 TacUMI를 확장하는 것을 제안합니다. 로봇이 경직된 공장 설정을 벗어나 더 역동적인 환경으로 이동함에 따라, TacUMI와 같은 장치를 통해 과제를 "느끼며" 수행하는 능력은 보는 능력만큼이나 근본적인 기능이 될 것입니다.
로봇 산업에 미치는 영향
더 넓은 로봇 산업 측면에서 TacUMI는 비싸고 번거로운 원격 조작 설정에 대한 의존도에서 벗어나는 변화를 시사합니다. 정교한 촉각 데이터를 수집하는 장벽을 낮춤으로써, 이 핸드헬드 인터페이스는 로봇 훈련의 더 빠른 반복을 가능하게 합니다. 실패 비용이 높고 작업의 복잡성이 엄청난 가전 제조 및 가사 서비스와 같은 분야에서, 장기 작업을 학습 가능하고 촉각 정보가 반영된 모듈로 분해하는 능력은 자율 솔루션을 배포하는 데 필요한 시간을 대폭 단축할 수 있습니다. Fan Wu와 연구팀이 언급했듯이, 이러한 감각 모달리티의 통합은 단순한 기술적 업그레이드가 아닙니다. 이는 촉각과 저항으로 정의되는 물리적 세계에서 작동해야 하는 로봇에게 필요한 진화입니다.

{kind=link}
Comments
No comments yet. Be the first!